This forum is disabled, please visit https://forum.opencv.org
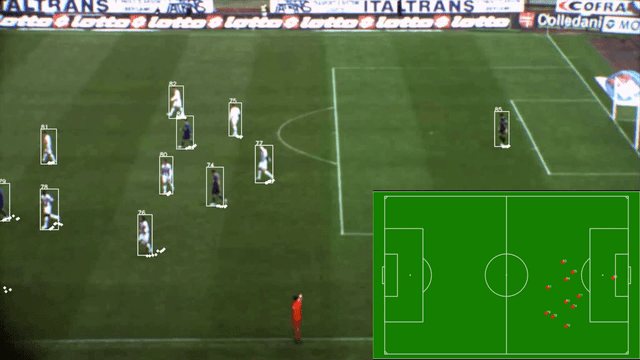
| 2020-12-03 06:11:33 -0600 | marked best answer | Birdseye transform with getPerspectiveTransform Hello I am currently working on creating a python software that tracks players on a soccer field. I got the player detection working with YoloV3 and was able to output quite a nice result with players centroids and boxes drawn. What i want to do now is translate the players position and project their centroids onto a png/jpg of a soccerfield. For this I inteded to use two arrays with refrence points one for the soccerfield-image and one for the source video. But my question now is how do I translate the coordinates of the centroids to the soccerfield image. Similiar example:
How the boxes and Markers are drawn: Boxes generated like this: |
| 2020-12-03 06:11:33 -0600 | received badge | ● Scholar (source) |
| 2020-12-01 02:32:11 -0600 | asked a question | Birdseye transform with getPerspectiveTransform Birdseye transform with getPerspectiveTransform Hello I am currently working on creating a python software that tracks p |