This forum is disabled, please visit https://forum.opencv.org
| 2018-11-08 12:58:14 -0600 | received badge | ● Student (source) |
| 2013-07-16 16:52:46 -0600 | commented answer | How can i calibrate 2 not aligned Cameras Tank you verry much! You were right the intrinsics where the problem... I captured new images used CV_CALIB_FIX_INTRINSIC and changed a bit of code (just to make it look nicer ;)) and it is working now! |
| 2013-07-16 16:50:36 -0600 | received badge | ● Scholar (source) |
| 2013-07-15 13:13:55 -0600 | commented answer | How can i calibrate 2 not aligned Cameras Thank you for your quick answer, i'll give it a try (in several other attemps i did it like this but maybe there were other problems too ;) Well the Kinectimage is half as big as the other image but i scaled it before using... (ugly i know but it should work, should it... :P?) |
| 2013-07-15 13:12:55 -0600 | received badge | ● Supporter (source) |
| 2013-07-15 10:30:59 -0600 | received badge | ● Editor (source) |
| 2013-07-15 10:30:23 -0600 | asked a question | How can i calibrate 2 not aligned Cameras Hello, i hope I am describing it the right way. I have a set of 4 Cameras pointing down at one Object. If you look from above one Camera is at 0 o'clock one at 3 o'clock one at 6 o'clock and one at 9 o'clock.
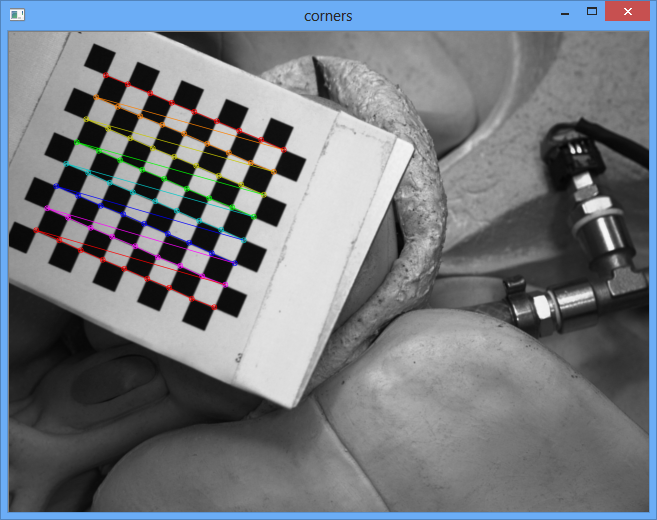
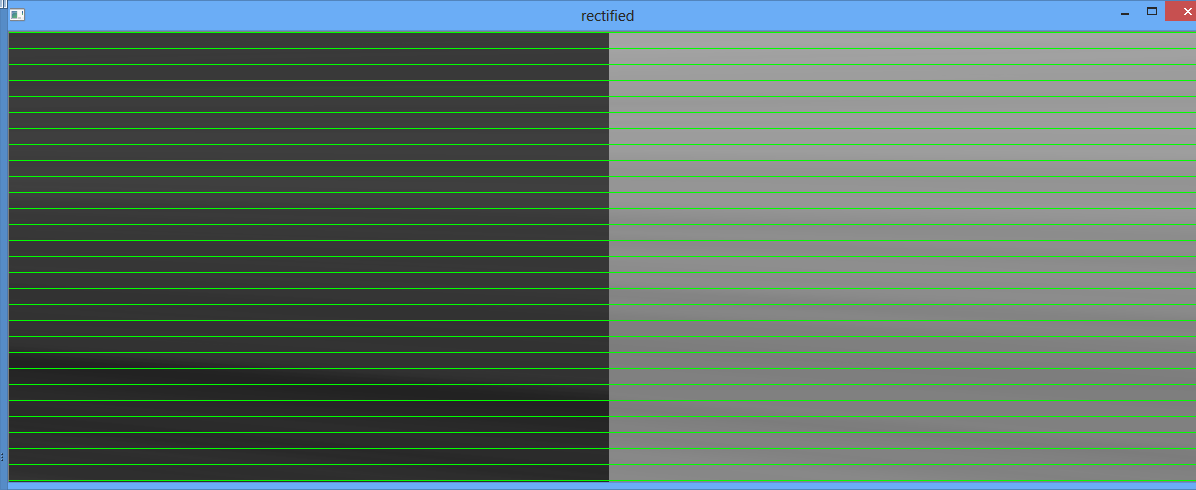
I now want to use one Kamera (the one at 0) and calibrate each of the other cameras with this Camera. Bit It doesn't seem to work. After trying for a month now i used the example File from the opencv samples without any changes and it wouldn display anything usable. Right now I am running again the Calibration for the Cameras at 0 and 9 o'clock (in the picture it i the kinect and the one right to the kinect) to be able to post an image of the Result but so far: Does anyone know if it is possible to calibrate those Cameras with Opencv or how it is done? thank you verry much steaff Those are the source and the resulting Image and the content of the calculated matrices
The Intrinsic Camera Parameters: %YAML:1.0 M1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 2.2241379209351021e+003, 0., 6.3059176335930135e+002, 0., 2.2241379209351021e+003, 5.1007775759383134e+002, 0., 0., 1. ] D1: !!opencv-matrix rows: 1 cols: 8 dt: d data: [ 1.0043368468776315e+000, -3.4416247147983135e+001, 0., 0., 0., 0., 0., 4.7443526196894297e+000 ] M2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 2.2241379209351021e+003, 0., 7.1690683602360411e+002, 0., 2.2241379209351021e+003, 5.4388045026940574e+002, 0., 0., 1. ] D2: !!opencv-matrix rows: 1 cols: 8 dt: d data: [ 6.6088041195880498e-001, -1.1820658547536208e+001, 0., 0., 0., 0., 0., -7.2303203938806320e+001 ] The Extrinsic Camera Parameters: %YAML:1.0 R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 6.1501820069651592e-001, -7.2649429222532536e-001, 3.0652676257717498e-001, 7.0686612034488350e-001, 6.8023651807437502e-001, 1.9395506538016299e-001, -3.4941794561898637e-001, 9.7387488118721999e-002, 9.3189204119218294e-001 ] T: !!opencv-matrix rows: 3 cols: 1 dt: d data: [ -3.1075937414718489e+001, -1.2954808145854402e+001, -4.6420195458050941e+001 ] R1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 2.1012586079464327e-001, -1.6119129293625789e-001, 9.6429481472568745e-001, 3.9746030635964452e-001, 9.1521541260311323e-001, 6.6378109360021809e-002, -8.9323705000061882e-001, 3.6932115511469271e-001, 2.5637756705870601e-001 ] R2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 5.4191795082816152e-001, 2.2591251198904466e-001, 8.0949890147980208e-001, -4.0010678397909216e-001, 9.1638854084540944e-001, 1.2107998229665726e-002, -7.3908016884781491e-001, -3.3044754369494300e-001, 5.8699652884992803e-001 ] P1: !!opencv-matrix rows: 3 cols: 4 dt: d data: [ -2.9229981928635933e+001, 0., -6.9050370635986328e+003, 0., 0., -2.9229981928635933e+001, 1.9621982192993164e+002, 0., 0., 0., 1., 0. ] P2: !!opencv-matrix rows: 3 cols: 4 dt: d data: [ -2.9229981928635933e+001, 0., -6.9050370635986328e+003, 1.6761745715555271e+003, 0., -2.9229981928635933e+001, 1.9621982192993164e+002, 0., 0., 0., 1., 0. ] Q: !!opencv-matrix rows: 4 cols: 4 dt: d data: [ 1., 0., 0., 6.9050370635986328e+003, 0., 1., 0., -1.9621982192993164e+002, 0., 0., 0., -2.9229981928635933e+001, 0., 0., 1.7438506957846198e-002, 0. ] |