This forum is disabled, please visit https://forum.opencv.org
| 2020-04-13 02:08:21 -0600 | edited question | How to detect foreign objects on a plane? What is the best approach to detect any object on a plane? Hello! My task is to detect whether table clean or not. My c |
| 2020-04-13 02:08:16 -0600 | edited question | How to detect foreign objects on a plane? What is the best approach to detect any object on a plane? Hello! My task is to detect whether table clean or not. My c |
| 2020-04-13 01:30:06 -0600 | asked a question | How to detect foreign objects on a plane? What is the best approach to detect any object on a plane? Hello! My task is to detect whether table clean or not. My c |
| 2019-08-27 05:08:53 -0600 | asked a question | How to make the disparity map filter not adapting? How to make the disparity map filter not adapting? Hello! I am using WLS filter for beautify and stabilize disparity map |
| 2019-08-16 05:53:53 -0600 | received badge | ● Teacher (source) |
| 2019-08-12 13:21:58 -0600 | marked best answer | How to calculate surface roughness in disparity map? Hello!
I am developing small project connected with security. I created simple face detection/recognition and stereo matching. So i have disparity map of the face region. |
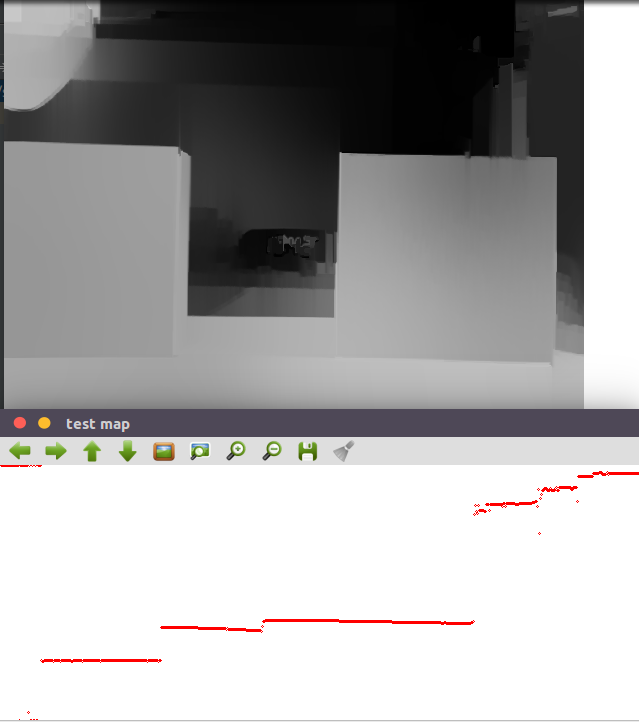
| 2019-08-11 01:59:34 -0600 | marked best answer | How to implement indoor SLAM in mobile robot with stereo vision? Hi there! I am currently developing a autonomous humanoid home assistant robot. |
| 2019-08-11 01:59:34 -0600 | received badge | ● Scholar (source) |
| 2019-08-11 01:11:19 -0600 | received badge | ● Enthusiast |
| 2019-08-10 07:23:13 -0600 | commented answer | How to calculate surface roughness in disparity map? @opalmirror, thank you for supporting and feedback! I solved my problem with SVM when i maked sample code for question a |
| 2019-08-10 06:34:21 -0600 | received badge | ● Supporter (source) |
| 2019-08-09 14:39:48 -0600 | received badge | ● Self-Learner (source) |
| 2019-08-09 10:33:23 -0600 | commented answer | How to implement indoor SLAM in mobile robot with stereo vision? Thank you! There is a lot of information and I will study this. Thank you for video courses because in most cases they a |
| 2019-08-09 09:55:48 -0600 | asked a question | How to implement indoor SLAM in mobile robot with stereo vision? How to implement indoor SLAM in mobile robot with stereo vision? Hi there! I am currently developing a autonomous humano |
| 2019-08-09 04:23:36 -0600 | received badge | ● Editor (source) |
| 2019-08-09 04:23:36 -0600 | edited answer | How to calculate surface roughness in disparity map? So. i solved my problem. Firstly i calculated histogram of face disparity map. Then i collected a small dataset with rea |
| 2019-08-09 04:23:19 -0600 | answered a question | How to calculate surface roughness in disparity map? So. i solved my problem. Firstly i calculated histogram of face disparity map. Then i collected a small dataset with rea |
| 2019-08-08 01:46:06 -0600 | commented question | How to calculate surface roughness in disparity map? @opalmirror, thank you! I tried to find any opencvs or mathematical algorithm, but totally forget about SVM. I already h |
| 2019-08-07 03:30:02 -0600 | commented question | How to calculate surface roughness in disparity map? @opalmirror, thank you for useful tip! i could calculate the histograms and histogram of real and fake faces. And they a |
| 2019-08-07 03:28:55 -0600 | commented question | How to calculate surface roughness in disparity map? @opalmirror, thank you for useful tip! i could calculate the histograms and histogram of real and fake face are differ c |
| 2019-08-06 11:04:54 -0600 | commented question | How to calculate surface roughness in disparity map? @HYPEREGO. thank you for quick reply. I have implemented stereo vision using two cameras and SGBM. I am also implemented |
| 2019-08-06 09:16:40 -0600 | asked a question | How to calculate surface roughness in disparity map? How to calculate surface roughness in disparity map? Hello! I am developing small project connected with security. I cre |