This forum is disabled, please visit https://forum.opencv.org
| 2016-04-24 21:26:12 -0600 | received badge | ● Enthusiast |
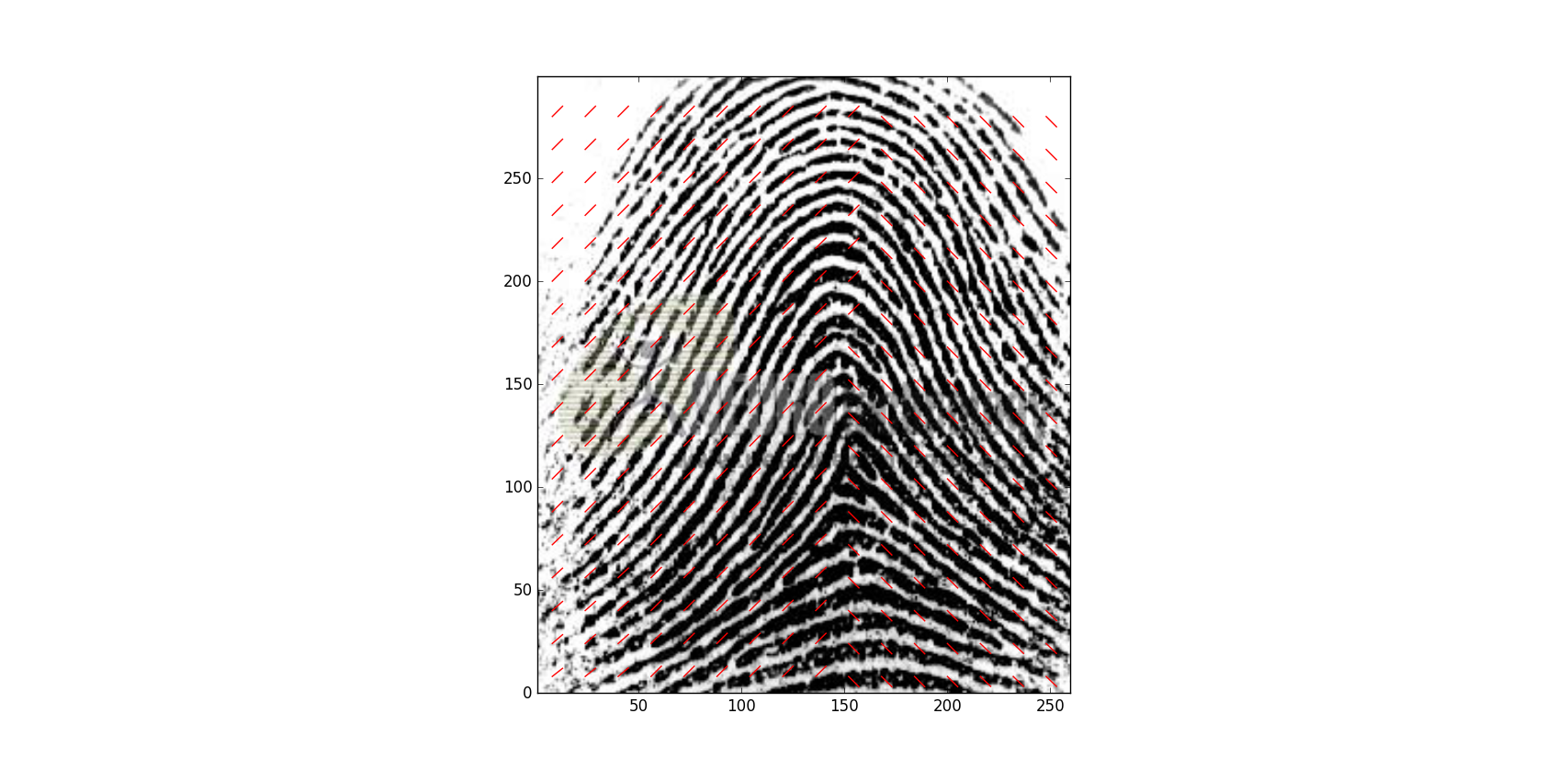
| 2016-04-21 14:59:49 -0600 | asked a question | how to compute image gradient using Sobel operator Hi everyone, I'm trying to get an orientation map from a fingerprint image but I don't know if the way I compute the gradient in each direction(x and y) is good. That's my python code I also see in some question the use of "cv2.convertScaleAbs" but I don't know why it is used. all the code are: with the code above and the following plotting function the result is not what I expect
|
| 2016-04-19 13:51:17 -0600 | commented answer | Fingerprint orientation map with this I can't see how it is possible to get an orientation map |
| 2016-04-19 13:33:34 -0600 | asked a question | implementation of an orientation map for fingerprint enhancement I'm implementing a function to get an orientation map of a fingerprint image using opencv and python but something is wrong I don't know what this is my code I'm implementing the following algorithm algorithm at 2.4 Orientation Image section but my code is not working properly, I don't get the right orientation map. Can any one help me troubleshooting this? B.R |
 ')
') 