This forum is disabled, please visit https://forum.opencv.org
| 2017-08-18 08:19:22 -0600 | asked a question | IOS opencv memory rad failed for 0x0 when program go to a certain line, it goes to stop at queue:
|
| 2017-04-24 01:07:31 -0600 | received badge | ● Editor (source) |
| 2017-04-24 00:47:55 -0600 | asked a question | Issues Compiling opencv3.2 with CUDA on Mac OS 10.12 My env and lib versions:
I intended to install opencv3.2 by compiling source code. cmake settings like below: build without TURN OFF TURN ON with the setting as above compiled successfully! but without opencv_highgui & opencv_videoio how can I show a image or read camera frames? if I build opencv_videoio, and select any one of errors like: (this error generate with quicktime FLAG)
|
| 2016-04-24 23:14:37 -0600 | commented question | Stereo Rectify doesn't rectify even with correct M and D if your chessboards do not vary a lot(camera view angle to the chessboard's principle axis) in each image, you won't get the good intrinsic params( LM estimation won't converge to good result. all the input are similar and reduce the rank of Matrix). eventually after remaping image you get worse result. |
| 2016-04-22 01:20:59 -0600 | received badge | ● Enthusiast |
| 2016-04-19 02:55:48 -0600 | commented question | Stereo Rectify doesn't rectify even with correct M and D I think your issue is identical to mineprobem. it seems that your distortion model is not well set. in my problem it is not nessecery to use k6 in distortion model. your distortion model use k3 and k4 , i think it is not appropriate. |
| 2016-04-18 20:59:19 -0600 | commented question | Stereo Rectify get incorrect result! I finally get the reason.the distortion params used are not appropriate. set CALIB_FIX_K6 will get correct result. my test imgs are not distort severely, so it not nessecery to use K6 in distortion model. |
| 2016-04-18 20:17:08 -0600 | commented question | Stereo Rectify get incorrect result! yes. if you have any clue ,please let me know! thanks |
| 2016-04-18 00:24:04 -0600 | asked a question | Stereo Rectify get incorrect result! I am working on stereo calibration with these steps: 1. findChessborad -> cornerSubPix 2. stereoCalibrate to get R T E F 3.undistortPoints and computeCorrespondEpilines 4.stereoRectify to get R1 R2 P1 P2 Q 5.initUndistortRectifyMap to get remap matrix 6 remap all the steps followed the cpp example given in the opencv package.
one pair of images I used as below:
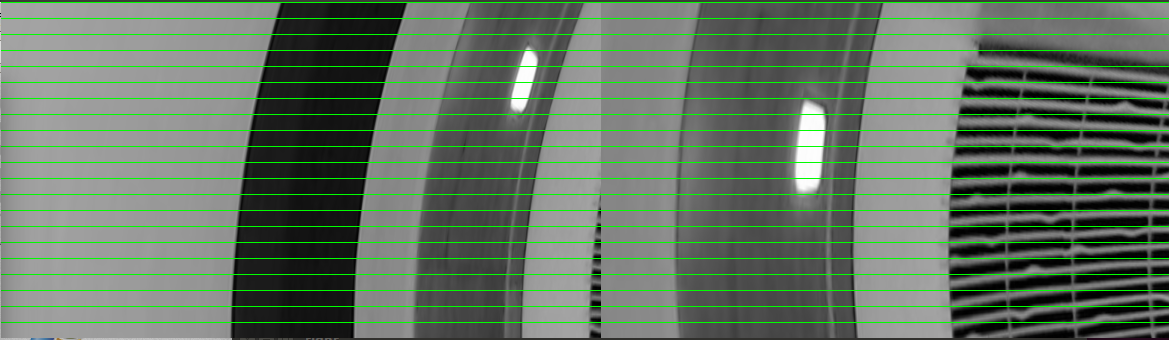
the result I get is:
if I use : findFundamentalMat and stereoRectifyUncalibrated instead of stereorectify to get R1 R2 P1 P2 will get a correct result. here is my code snapshot: |