This forum is disabled, please visit https://forum.opencv.org
| 2020-10-04 02:32:33 -0600 | received badge | ● Notable Question (source) |
| 2018-01-09 13:55:15 -0600 | received badge | ● Famous Question (source) |
| 2017-06-30 00:48:45 -0600 | received badge | ● Popular Question (source) |
| 2017-05-02 14:01:16 -0600 | received badge | ● Notable Question (source) |
| 2017-02-15 06:34:06 -0600 | received badge | ● Popular Question (source) |
| 2016-05-13 03:10:28 -0600 | asked a question | Object tracking when lost and found again I am new to opencv. My objective is to perform object tracking and track a specific object. Save the features for example and re-track it if it's lost and found again in the plane. How can i perform that tracking ? And then how can i search for features ? |
| 2016-04-30 11:33:58 -0600 | asked a question | Error when using cv::StereoBM Hello , I am new to opencv . I am trying to create a disparity map as found in this tutorial : http://stackoverflow.com/questions/31... but i come up with following error : undefined reference to `cv::StereoBM::create(int, int)' . Any help ?? What is missing ? |
| 2016-04-24 10:39:22 -0600 | received badge | ● Citizen Patrol (source) |
| 2016-04-23 18:52:32 -0600 | commented answer | Optical flow based Obstacle Avoidance Yes i can understand that larger optical flow equals closer distance from object. But do i simply have to divide the width of the camera view(e.g. 480pixels) by 2 ? |
| 2016-04-23 14:23:33 -0600 | commented answer | Optical flow based Obstacle Avoidance I can compute the optical flow but how can i tell right from left image? Or do you mean if the result is positive or negative ? |
| 2016-04-23 11:15:41 -0600 | commented answer | Optical flow based Obstacle Avoidance I have edited my question . @Tetragramm |
| 2016-04-23 10:10:22 -0600 | asked a question | Optical flow based Obstacle Avoidance Hello everyone , i am trying to build a obstacle avoiding robot with monocular vision and want to use the optical flow from the camera to make it take decisions and avoid some static obstacles in a room , such as walls , tables , chairs etc. How can i achieve it ? EDIT : I have read several papers , they suggest an approach of comparing the optical flow vectors in the camera view and if the right one are bigger than the left , then turn left to avoid the obstacle. However , I have not been able to understand how I can achieve that using c++ . |
| 2016-04-05 10:44:45 -0600 | commented answer | Formula to calculate the speed of moving vehicle using focal length in openCV Yes it is the same , but now the object is approaching the camera not the opposite . |
| 2016-04-04 16:31:32 -0600 | commented answer | How can i cluster moving objects in a video ? @berak And then how can I visualize the effect of that procedure ? What am I going to do ? |
| 2016-04-04 11:29:09 -0600 | answered a question | Error in Opencv instation (error: field 'cap' has incomplete type) You are only installing the contrib package . Not the whole library. Try this : sudo apt-get install build-essential sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo mkdir /opt/opencv-3.1.0 cd /opt/opencv-3.1.0 sudo git clone https://github.com/Itseez/opencv.git sudo git clone https://github.com/Itseez/opencv_cont... cd /opt/opencv-3.1.0/opencv sudo git checkout 3.1.0 cd /opt/opencv-3.1.0/opencv_contrib sudo git checkout 3.1.0 sudo mkdir /opt/opencv-3.1.0/opencv/release cd /opt/opencv-3.1.0/opencv/release sudo apt-get install qt5-default sudo cmake -D CMAKE_BUILD_TYPE=RELEASE -DWITH_OPENGL=ON -DWITH_QT=ON -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=/opt/opencv-3.1.0/opencv_contrib/modules .. sudo make sudo make install pkg-config --modversion opencv |
| 2016-04-04 07:37:23 -0600 | commented answer | "flow" in "calcOpticalFlowFarneback(...) Actually I will just try for K=2 ( a kind of background substraction ) . Thanks i will try it . |
| 2016-04-04 07:29:07 -0600 | commented answer | "flow" in "calcOpticalFlowFarneback(...) So if I want to use k means to detect moving objects do i just give the vector (e.g. points ) as input ? |
| 2016-04-04 06:18:41 -0600 | commented answer | "flow" in "calcOpticalFlowFarneback(...) So , how can someone use LK to create a Mat flow similar to Farneback ? Simply by substructing the position coordinates ? |
| 2016-04-04 06:17:24 -0600 | received badge | ● Supporter (source) |
| 2016-04-03 19:28:04 -0600 | received badge | ● Scholar (source) |
| 2016-04-03 19:27:06 -0600 | commented question | how can i detect eye blinking? Try to be more specific . Provide the software you use and describe the problem etc. |
| 2016-04-03 19:26:37 -0600 | answered a question | how can i detect eye blinking? Try to be more specific . Provide the software you use and describe the problem etc. |
| 2016-04-03 19:26:02 -0600 | received badge | ● Critic (source) |
| 2016-04-02 14:19:38 -0600 | commented question | installing extra modules @berak No extra modules found in folder: /Downloads/opencv_contrib-master/modules . What has happened ?? |
| 2016-03-31 10:20:40 -0600 | commented answer | Formula to calculate the speed of moving vehicle using focal length in openCV Y is for example the height of an object in real life . You have to have one unknown parameter . So you have to suppose the height of the object as known, e.g. of a traffic signs 40 cm radius or of a tree 5m height. Then x1,x2 are the dimensions of the tree for example in two images , if you open it via paint for example you can see how many pixel each object takes . It is logical that the size of the objects in pixels grow as the camera approaches the real object . |
| 2016-03-26 09:32:19 -0600 | commented question | Difference between Point and Point2f Ok thank you ! For example when i use : Mat A ; A.at<point2f>(y,x); what result do i get ? |
| 2016-03-26 08:50:12 -0600 | asked a question | Difference between Point and Point2f Hello I am new to opencv and I want to understand the difference of use of Point and Point2f .Can anyone please explain that and also give an example ? |
| 2016-03-26 07:46:17 -0600 | commented answer | Formula to calculate the speed of moving vehicle using focal length in openCV Glad i helped ! :) Hope i will get voted up |
| 2016-03-24 12:25:57 -0600 | received badge | ● Editor (source) |
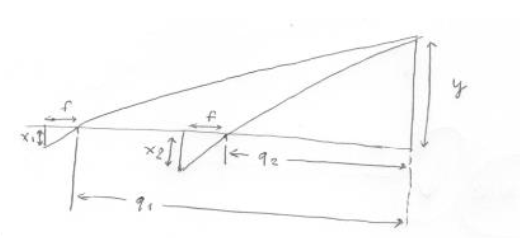
| 2016-03-24 12:25:00 -0600 | answered a question | Formula to calculate the speed of moving vehicle using focal length in openCV
In this image : f stands for focal length , q1,q2 distances of an object from the camera , y a dimension of the object and x1,x2 the real size of the object in an image. Let Dq=q1-q2 :
In that way , between two successive frames you can compute : Dq and divide it by the time between two successive frames to find the velocity . Basic assumption is that the camera is centered in the middle of the car and that there are no turns etc. in the road . |
| 2016-03-24 06:29:19 -0600 | asked a question | Using k means for image clustering I am using c++,OpenCV library and in my software, I have estimated the optical flow in a video. Now, I want to group some moving objects, e.g. moving cars. I have used a dense optical flow algorithm (Farneback). My first thoughts so far are to use "k means" algorithm to do the clustering. I have thought of using the results of the Farneback optical flow to compute the displacement of the frames in each direction as following : E.g. : Let Dx be the displacement in x direction( either positive or negative) and Dy the displacement in y direction(either positive or negative) . Then i pass the array [Dx,Dy] as an input to k means with k=2 clusters. I hope this will give a rough background / foreground substraction . However i am facing problems in computing the displacemet because the output of calcOpticalFlowFarneback is InputOutputArray flow . Should I access this array using a function like that for example ? : findDisplacements(const Mat& flow, int step) { const Point2f& Dx,Dy; const Point2f& fxy = flow.at<point2f>(y, x); Dx=Point(cvRound(x+fxy.x))-Point(x,y); Dy=Point(cvRound(y+fxy.y))-Point(y,x); } |
| 2016-03-22 07:22:25 -0600 | commented question | error: (-215) scn == 3 || scn == 4 in function cv::ipp_cvtColor How can i check if the video is encoded ? I happens with all videos not only with one particular . |
| 2016-03-21 16:24:42 -0600 | asked a question | error: (-215) scn == 3 || scn == 4 in function cv::ipp_cvtColor I am trying to use following code : import numpy as np import cv2 cap=cv2.VideoCapture('video.avi') ret, old_frame = cap.read() old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY) And I end up with following error : error: (-215) scn == 3 || scn == 4 in function cv::ipp_cvtColor What could be the cause ? If i change the input of cap from .avi file to 0 (default camera) the programm works fine. Any suggestions? Thanks in advance ! |
| 2016-03-16 12:28:32 -0600 | answered a question | How can i cluster moving objects in a video ? Ok I have decided to solve the problem with a static camera at first. I have computed the optical flow and i want to use this information to cluster the image. How can i take that into consideration in kmeans function ? Should i include the optical flow result in the Input Array of the function ? |
| 2016-03-16 12:15:42 -0600 | received badge | ● Enthusiast |
| 2016-03-09 03:32:56 -0600 | received badge | ● Student (source) |
| 2016-03-08 10:42:02 -0600 | asked a question | How can i cluster moving objects in a video ? I am relative new to opencv . Thank you in advance ! |
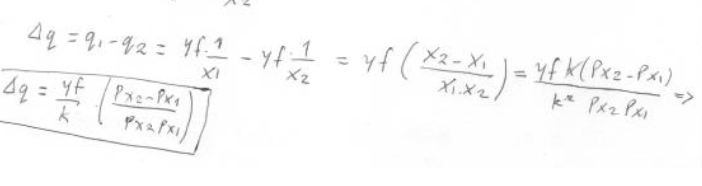 , where k is the size of the CCD of the camera , so Px1,Px2 are the pixel sizes in the image .
, where k is the size of the CCD of the camera , so Px1,Px2 are the pixel sizes in the image .