This forum is disabled, please visit https://forum.opencv.org
| 2019-05-16 03:37:03 -0600 | received badge | ● Notable Question (source) |
| 2018-07-20 11:06:34 -0600 | received badge | ● Popular Question (source) |
| 2016-10-07 12:19:17 -0600 | received badge | ● Scholar (source) |
| 2016-06-18 03:50:53 -0600 | commented question | Calibration with findCirclesGrid - trouble with pattern width/height Alright, thanks. |
| 2016-06-17 09:04:14 -0600 | received badge | ● Editor (source) |
| 2016-06-17 09:02:26 -0600 | commented question | Calibration with findCirclesGrid - trouble with pattern width/height Yes you're right, sorry. I knew that one of them was correct, I just forgot when I posed the question (fixed now). Actually my question is: 1. Why is there no correct way to detection the image in the wide orientation? 2. If I then choose the tall orientation of the image, does it only work if I had the actual image printout in the tall orientation, when posing it in front of the camera? |
| 2016-06-17 04:21:47 -0600 | received badge | ● Enthusiast |
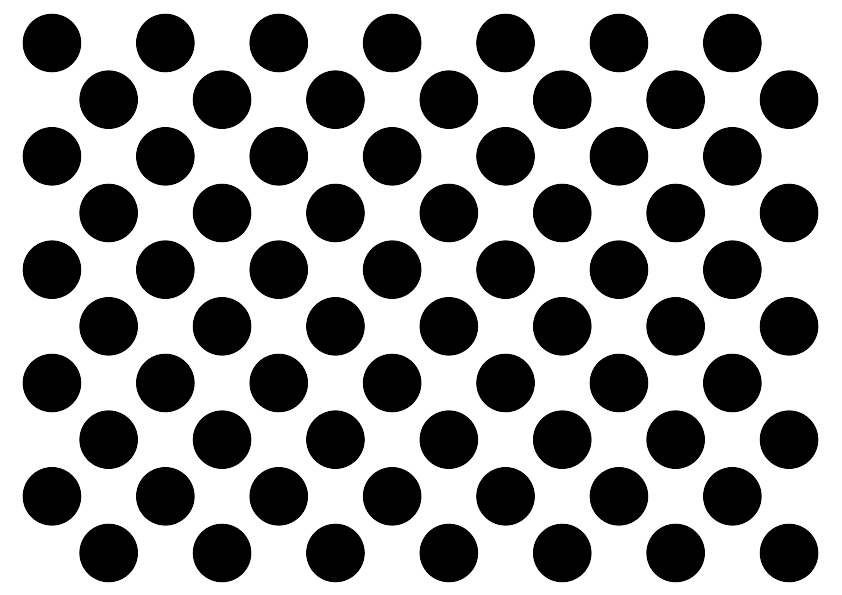
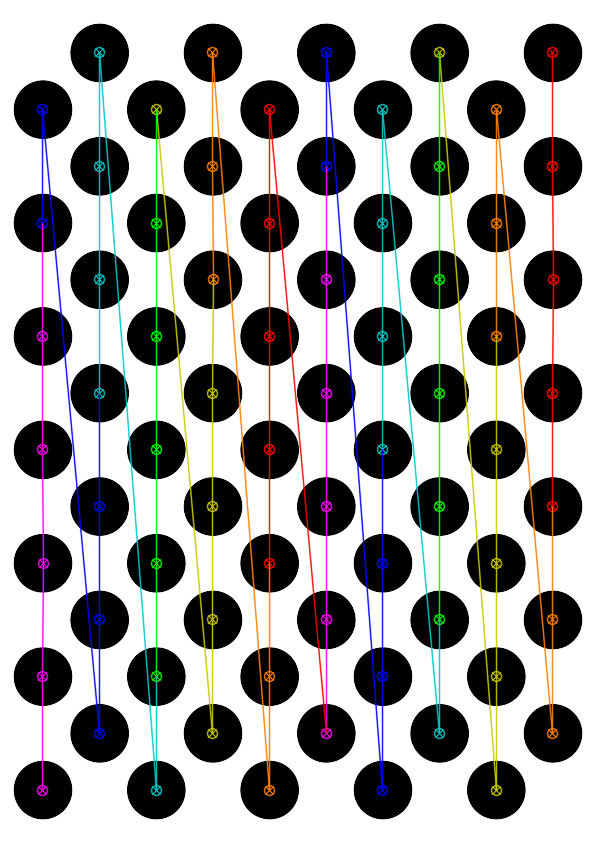
| 2016-06-15 12:57:05 -0600 | asked a question | Calibration with findCirclesGrid - trouble with pattern width/height Hi, I'm calibrating a GoPro Hero 4. I have calibrated using chessboard pattern. I would like to see if I can get a better calibration with the circles instead. However I'm having some problems determining the correct width/height. Here is the pattern I'm using (generated with the included gen_pattern.py):
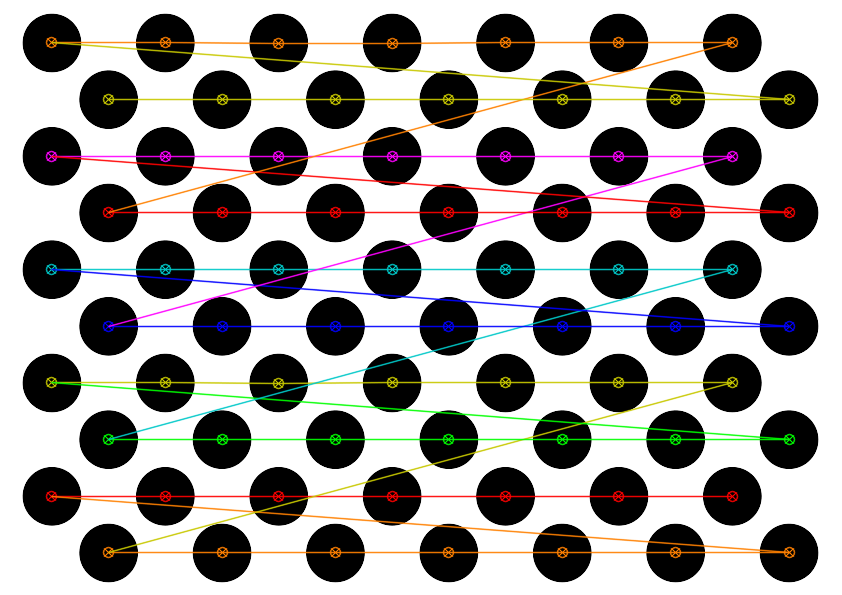
I'm using command: I have tried all possible combinations of any way you could count the width (14 or 7) and height (5 or 10), and any combination of the two. I also tried rotating the image. It detected the pattern in the following settings: Wide image, width=7, height=10:
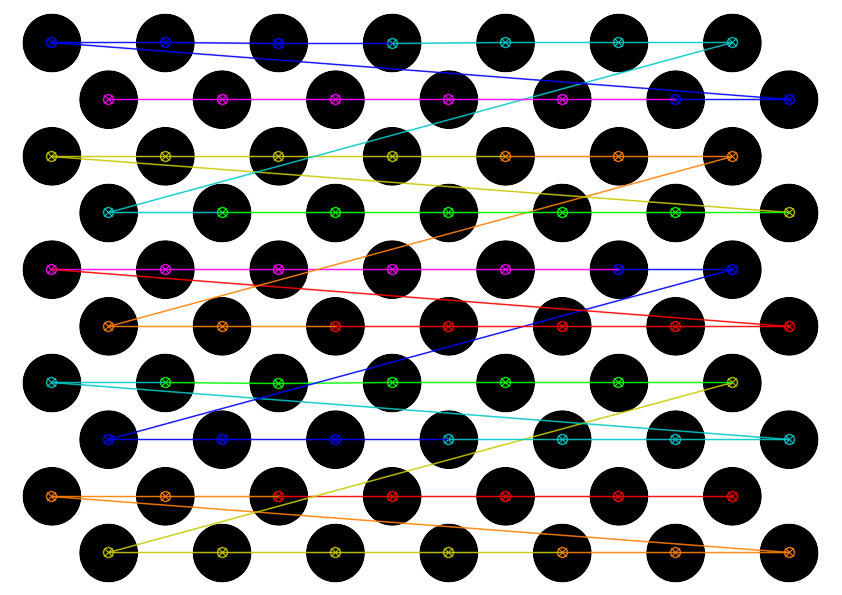
Looks correct at first glance, but seeing how the dots connect, it's wrong. Wide image, width=5, height=14:
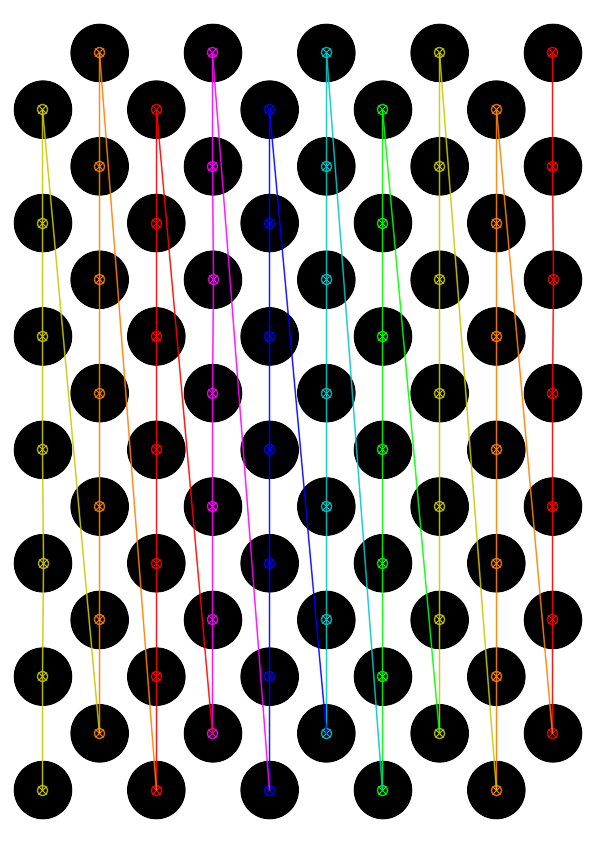
Clearly wrong. Tall image, width=7, height=10:
This is actually correct. Tall image, width=5, height=14:
Again, clearly wrong. So my questions are: 1. Why is there no correct way to detection the image in the wide orientation? 2. If I then choose the tall orientation of the image, does it only work if I had the actual image printout in the tall orientation, when posing it in front of the camera? It seems somewhat less table to me than the chessboard, but I could be wrong? What am I doing wrong? Thanks in advance. |
| 2016-03-08 13:26:33 -0600 | commented answer | Entering >5 points into "findEssentialMat"? That's what I was hoping for, thanks. Do you know how MEDS is different and pros/cons compared to RANSAC? |
| 2016-03-07 08:36:42 -0600 | asked a question | Entering >5 points into "findEssentialMat"? Hi, I'm trying to figure out the relative pose (R, t matrices) of two cameras using two synchronized videos of the same scene viewed from different positions. As input I've selected points of the same object in corresponding frames of both videos, and findEssentialMat needs at least 5. My question is: what happens if I feed in more than 5 problems? Ideally I'd like to feed in many more points than 5 points and get a more accurate estimate than just 5 points would give. That's what I hope. Otherwise I'd consider finding R,t from many pairs of 5 points of points, then taking the median or mean as the best estimate. Thanks. |
| 2016-02-09 04:00:18 -0600 | commented question | Python reference documentation for 3.x ? I noticed the same. Python documentation is there for 3.0 beta, but not 3.1. This was also asked on October 24th 2015, but no answer yet. |
| 2016-02-09 04:00:18 -0600 | answered a question | Python reference documentation for 3.x ? |
| 2016-02-09 03:54:41 -0600 | received badge | ● Supporter (source) |