This forum is disabled, please visit https://forum.opencv.org
| 2016-01-09 02:55:43 -0600 | received badge | ● Enthusiast |
| 2016-01-08 15:43:55 -0600 | received badge | ● Editor (source) |
| 2016-01-08 15:42:54 -0600 | commented question | Results from cv::StereoSGBM::create. Which is the best and why? Thanks for your comment. Yes, my data are too bad. I have to construct 3D model so I need a good precision. So, what can I do to improve my results? |
| 2016-01-05 10:44:22 -0600 | received badge | ● Student (source) |
| 2016-01-05 10:34:19 -0600 | commented answer | NumDisparity and blocksize. please glance at http://answers.opencv.org/question/82... |
| 2016-01-05 10:34:03 -0600 | received badge | ● Scholar (source) |
| 2016-01-05 10:34:00 -0600 | received badge | ● Supporter (source) |
| 2016-01-05 09:29:11 -0600 | asked a question | Results from cv::StereoSGBM::create. Which is the best and why? Hi, I am trying to get something like 3D model ( Point Cloud) from two stereo photos. I have two cameras and I am trying to construct something like stereo camera. But first, I used photos from openCV. I mean https://github.com/Itseez/opencv/tree... left* and right* photos. Then, I used them to compute a depth map. First, I had to compute fundametnal matrix and so on. So my results are: Fundamental Matrix: [ -3.0705036824081975e-08, -5.5010692613284437e-06, -4.1537003996251830e-07,
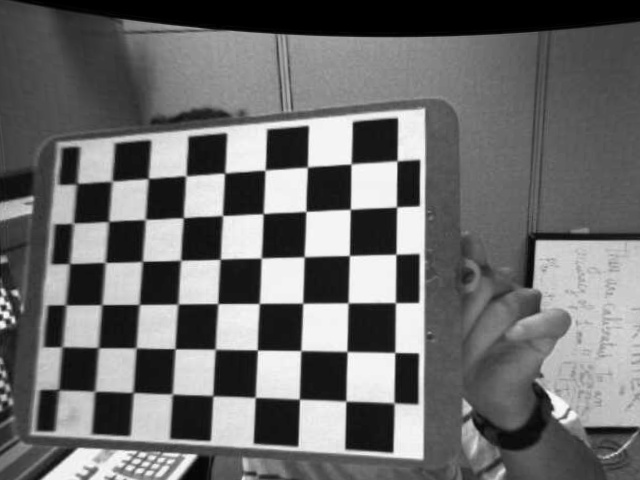
1.6027916082131190e-06, 3.0918646836239451e-06, -9.0983417770729963e-02, And rms error returned by cv::stereoCalibrate is 0.276421 I chose two photos (left04.jpg and right04.jpg) and I created a depth map for it. Obviously, I rectified images. So I present here rectified photos and results and my questions: Left rectified:
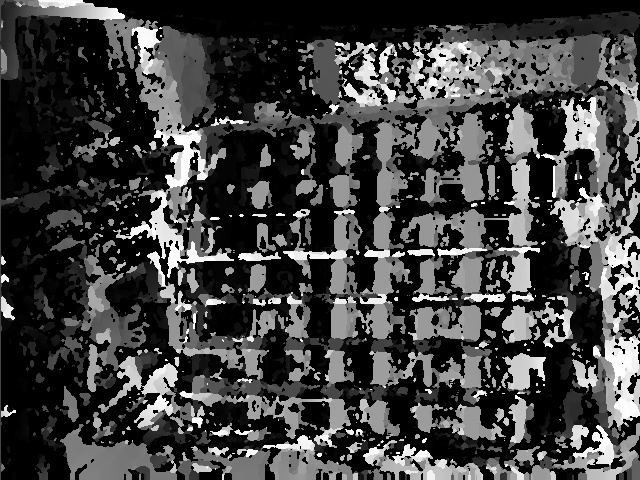
And depth maps using: cv::StereoSGBM::create(0, 256, 31):
cv::StereoSGBM::create(0, 128, 31):
Questions:
The second question is the most important for me because I have no experience and it is too hard to decide for me. Please make clear my doubts. |
| 2016-01-05 03:44:23 -0600 | asked a question | NumDisparity and blocksize. Hi, I am trying to create a depth map using cv::StereoSGBM. But I don't know how to set parameters: numdisparity, mindisparity, blocksize. How to do it to get a good results? Thanks in advance. |
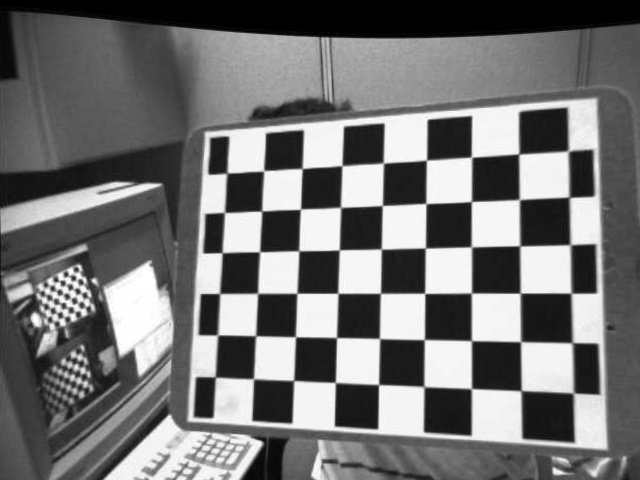 Right rectified:
Right rectified:
 cv::StereoSGBM::create(0, 256, 17):
cv::StereoSGBM::create(0, 256, 17):
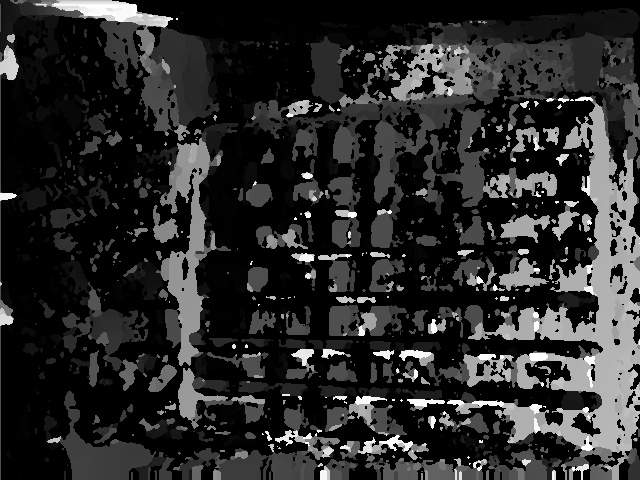
 cv::StereoSGBM::create(0, 128, 17):
cv::StereoSGBM::create(0, 128, 17):
 cv::StereoSGBM::create(0, 128, 11):
cv::StereoSGBM::create(0, 128, 11):