This forum is disabled, please visit https://forum.opencv.org
| 2015-09-08 15:36:11 -0600 | received badge | ● Nice Answer (source) |
| 2015-09-08 14:09:57 -0600 | received badge | ● Teacher (source) |
| 2015-09-08 09:27:10 -0600 | received badge | ● Self-Learner (source) |
| 2015-09-08 09:16:18 -0600 | answered a question | Line detection method my solution is Thanks Folks! |
| 2015-08-28 06:51:24 -0600 | received badge | ● Enthusiast |
| 2015-08-27 07:10:35 -0600 | commented question | Line detection method I Thank you for your ideas! I tried findContours and I find that usefull, but I need to split curves and aproximate just line from len/fiber siluete. thats where I'll try use PCA as you suggest! you really helped me! Thanks! |
| 2015-08-20 09:51:05 -0600 | commented question | Line detection method I have to set division point for quadrant partition, its quite hard to set threshold in whole frame, so I divided it into 4 parts and calculate it four times |
| 2015-08-20 08:32:15 -0600 | commented question | line segments from same line showing different angles Till you use integer interpretation of lines and you havent same lenght, you cant get exactly same angle. Remember how calculate atan? if dx/dy or dy/dx isnt same you receive diferent angles ((dx +1) / (dy+1) != dx/dy if angle isnt 45 deg) |
| 2015-08-20 07:43:47 -0600 | received badge | ● Editor (source) |
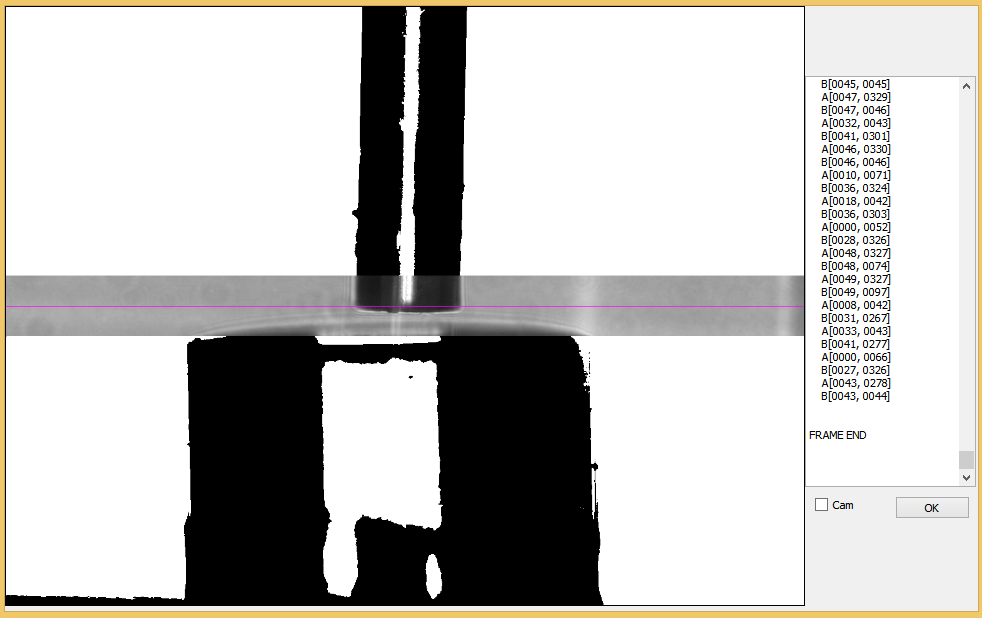
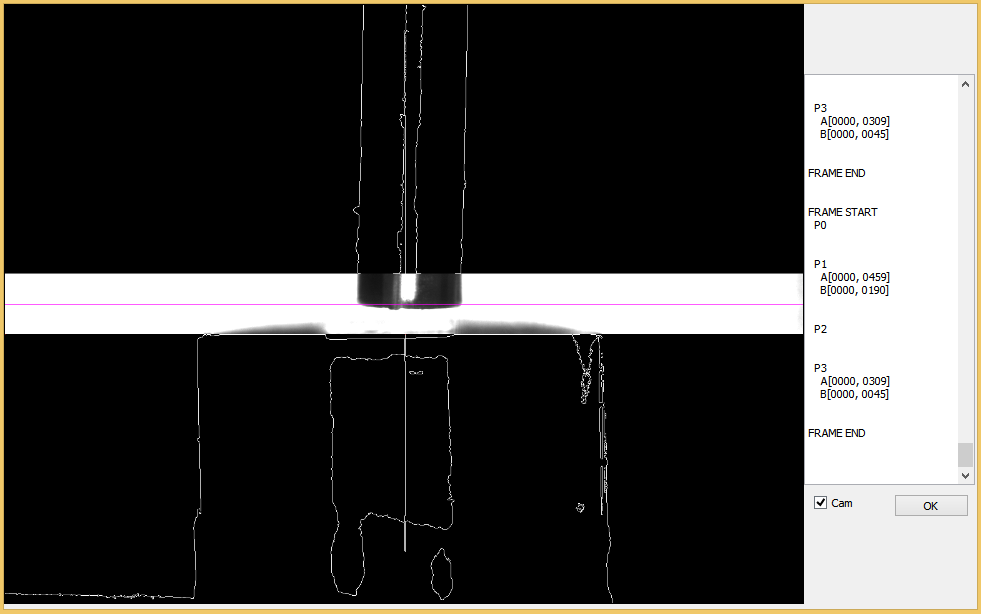
| 2015-08-20 07:39:10 -0600 | asked a question | Line detection method Hi Guys, I'm trying to do some project to detect um object in microscope. I'm using OpenCV for some time, but I dont underestand everything... Goal is:
I'm using Qt with c\c++ and openCV This is my image after BW threshold And this is my image after Canny I'm not able to find lines after Canny via HoughLineP, and I don't know why Can you suggest my why ? Here is my source code if(mat_orig.empty() == false)
{
cvtColor(mat_orig,mat_orig,CV_RGB2GRAY);
int cursor_x, top_limit, bot_limit;
int w_second;
int h_mid;
int o_x, o_y;
|