This forum is disabled, please visit https://forum.opencv.org
| 2016-04-10 04:13:55 -0600 | commented question | VideoWriter depthMap I converted my 16Bits Mat to an 8CU3 with : depthMap(x,y) =( 8UC3(x,y)[0] = depthMap(x,y)/256 , 8UC3(x,y)[1] = depthMap(x,y)%256, 8UC3(x,y)[2] = 0) By this way I'm able to compute my depth with : depth(x,y) = 8UC3(x,y)[1] * 256 + 8UC3(x,y)[1] It seems to work :) I'm not interested to watch my video, it's only a way to save my depthMap faster than using imwrite() |
| 2016-04-09 16:06:37 -0600 | commented question | VideoWriter depthMap Ok so it's one way to process but it can't be done directly. I'll try thx |
| 2016-04-09 11:15:24 -0600 | asked a question | VideoWriter depthMap Hi Is there a way to record 16U Mat with videoWriter to an avi file ? After recording, I read my video and the result is CV_8UC3 Mat. For exemple, I get one pixel before record my Mat and i get this same pixel after recording. Before : CV_16U, value : 2553 After : CV_8UC3, value 11 11 9 Thx |
| 2016-04-09 03:54:55 -0600 | commented question | image shift Ok thx, it's ok now. I tried with a different FOURCC like you said it and it's works :). This is really strange because the video could be played normally with a video player :s |
| 2016-04-09 03:36:23 -0600 | received badge | ● Enthusiast |
| 2016-04-08 14:19:31 -0600 | asked a question | image shift Hi I recorded some videos (BGR type and avi file) with a camera and when I try to open this file and read it I have a big shift :
i record my video with VideoWriter like this : outputColorVideo.open(videoPath, CV_FOURCC('I', '4', '2', '0'), 30, Size(640, 480), true); ... //Adding some frames ... outputColorVideo.release(); and I read it with VideoCapture like this : VideoCapture video(videoPath); if(video.isOpen()){ video.read(frame); imshow("test", frame); } ... Furthermore, when i watch my video with a movie player like VLC, everything is ok. Do you know what can explain this problem ? Thx a lot ! |
| 2016-03-25 03:49:42 -0600 | commented answer | Kinect one stereo calibration and overlay rgb with depth map Ok thank you for your reply, I will try it today. Of course, if you could share your code with me, it will be really helpful. How can we proceed ? GitHub ? |
| 2016-03-25 03:42:28 -0600 | received badge | ● Supporter (source) |
| 2016-03-24 12:03:45 -0600 | commented answer | Kinect one stereo calibration and overlay rgb with depth map Thank a lot i'll take a look on libfreenect2 and i'll tell you if it's good |
| 2016-03-24 11:36:38 -0600 | commented answer | Kinect one stereo calibration and overlay rgb with depth map First of all thank for helping me. Secondly, I don't want to compute depth map. I just want to get a 3D point for a pixel on the color map. It's just like the MapColorPointToCameraSpacePoint function in coordinatemapper class |
| 2016-03-24 07:27:51 -0600 | commented answer | Kinect one stereo calibration and overlay rgb with depth map I have recorded some frames (Color and Depth as png type) at 30fps and I didn't saved coordinateMapper. My goal is to post processing these frames and compute 3D points from color map. I understand that the only way to do this is to make a stereoCalibration of the Kinect that I used. Then i'll compute 3D point with depth map and apply rotation and translation matrix. Did I miss something or this way is a correct way ? |
| 2016-03-24 07:10:23 -0600 | received badge | ● Editor (source) |
| 2016-03-24 04:10:42 -0600 | answered a question | Kinect one stereo calibration and overlay rgb with depth map Hi Did you succeed ? I'm currently doing the same as you with Kinect v2 but unfortunately , I have problems with the stereocalibration. My rms is really bad. I don't know if I have to calibrate Color and Infrared map separately and then give instrinsics parameters to cv::stereoCalibration or do i have to let's cv::stereocalibration calibrate each camera. Moreover, can you tell me how many frames did you used to make your calibration ? I think you should take a look at this topic : http://nicolas.burrus.name/index.php/... it will allow you to project your points |
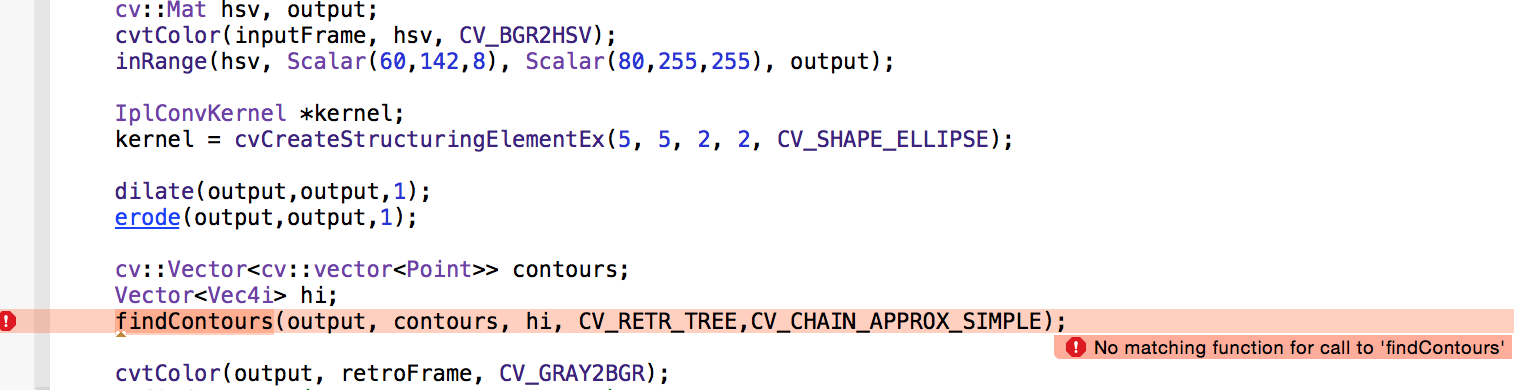
| 2015-08-06 04:06:39 -0600 | asked a question | no matching function for call findcontours Hello, I'm currently developing an application with openCV for IOS on Ipad. My work is based on the sample call 'Chapter13 : saving video' from 'Instant Opencv for iOS' book. I would like to process each frame from a video using the function findContours. Unfortunately, i have an error call 'No matching function for call to 'findContours'. That's seems really strange because Xcode allow me to auto-complete this function and i have no problem to use other functions like 'inRange' or 'cvtColor'. Also, i have the same error to draw a circle with the function 'circle'. I'm using opencv2.framework. below, my code and my error :
Thanks for your help |