This forum is disabled, please visit https://forum.opencv.org
| 2020-04-30 19:52:06 -0600 | received badge | ● Notable Question (source) |
| 2019-03-04 20:44:50 -0600 | received badge | ● Notable Question (source) |
| 2018-08-20 09:31:18 -0600 | received badge | ● Popular Question (source) |
| 2018-05-29 07:50:37 -0600 | received badge | ● Popular Question (source) |
| 2016-01-10 13:14:29 -0600 | received badge | ● Student (source) |
| 2015-06-18 15:21:18 -0600 | received badge | ● Self-Learner (source) |
| 2015-06-18 12:26:04 -0600 | asked a question | Converting Python to C++ I have the following opencv code in python and I would like to convert it to c++. I have already converted lines 1 and 2, but I got stuck on lines 3 and 4. Do any of you know how to convert those lines to c++. |
| 2015-06-18 12:22:50 -0600 | answered a question | Finding Leftmost and Rightmost Edge of Binary Image I found out how to do it. I just followed this website's tutorials. |
| 2015-06-12 14:23:19 -0600 | received badge | ● Supporter (source) |
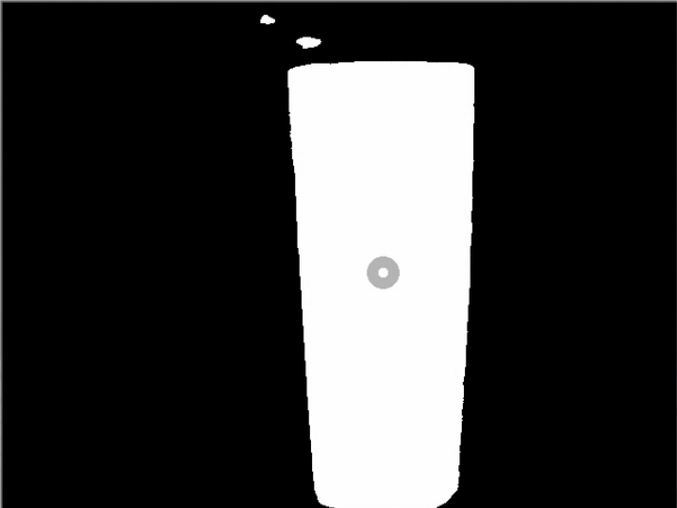
| 2015-06-12 12:39:43 -0600 | asked a question | Finding Leftmost and Rightmost Edge of Binary Image I am trying to find the leftmost and rightmost edge of a binary image like the one attached. I am currently doing this by using a for loop starting from the center of the white portion and working towards a direction until I get to my first black pixel. This works great except it is very slow. Is there any other ways to do this, but in a faster way. Thanks all who reply.
|