This forum is disabled, please visit https://forum.opencv.org
| 2020-10-21 13:15:38 -0600 | received badge | ● Notable Question (source) |
| 2018-12-17 10:01:45 -0600 | received badge | ● Popular Question (source) |
| 2017-09-26 07:25:04 -0600 | received badge | ● Student (source) |
| 2015-04-14 04:01:17 -0600 | commented answer | Position of a Roi in a mat locateROI is the function I missed in the docs. Thanks a lot |
| 2015-04-14 04:00:31 -0600 | received badge | ● Scholar (source) |
| 2015-04-14 04:00:29 -0600 | received badge | ● Supporter (source) |
| 2015-04-13 16:28:37 -0600 | asked a question | Position of a Roi in a mat Is it possible to know the position of a ROI made from a Mat if you pass both of them as argument of a function ? |
| 2015-04-13 15:21:42 -0600 | received badge | ● Enthusiast |
| 2015-04-07 18:04:20 -0600 | received badge | ● Editor (source) |
| 2015-04-07 17:54:05 -0600 | asked a question | Cmake can't find OpenCV I was using OpenCv from the repo under Fedora 21. Since I wanted to use the latest version, I downloaded the git version and followed the install instruction here. However when I try to compile my old project which worked fine with the repo it doesn't seem to work anymore : Here is my CMakeList.txt : Appears I need to change all my include with "cv.h" to "opencv/cv.h". But it means my program will not work with someone who installed it from the repo. Why is that ? [EDIT] even better if someone knows how I can make CMake use a version that I would install locally =) ! |
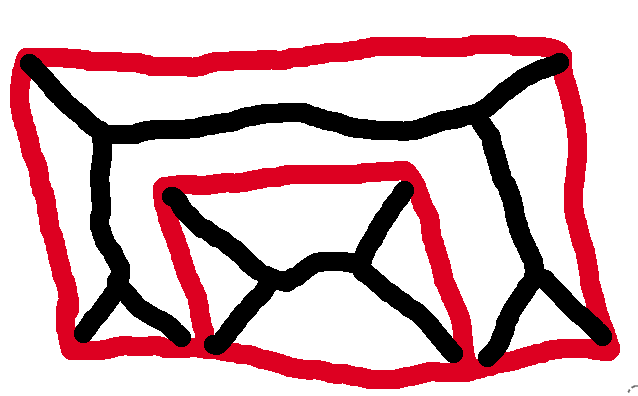
| 2015-04-07 15:25:03 -0600 | asked a question | Voronoi lines I'm trying to have an image with the voronoi line (the point on the image which are at an equal distance of at least to 0-value pixel). I know of Using delaunay here isn't really an option because I have only an image with lines and no points to give to Is there any "easy way" to get all those point at equal distance of 0-value pixel ? If I could not have to reimplement a Voronoi less efficient than the one implemented I'll be really glad. Here is a (bad) image made under GIMP. If the red lines are the 0-values point, then the black line would be my Voronoi lines :
Sorry for the very badly drawn drawing ! What I tried for now :
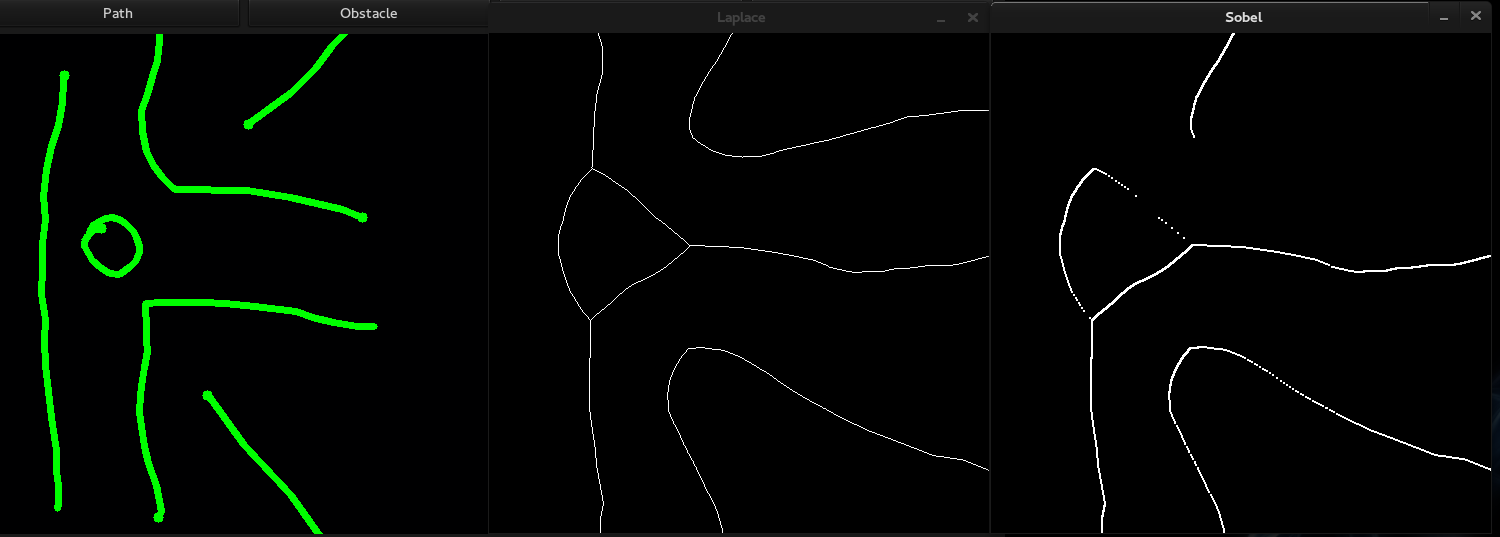
For exemple, here are my results with Laplace and Sobel using the label. The Laplace one here is perfect because non of the lines are connected. If I were to put a "dead-end" (connect the two line on top for example), my top line would disappear. And I don't want that :) Thanks ! |
| 2015-04-07 15:09:41 -0600 | commented question | iterate through a matrice, int to uchar problem Arf, silly me, you're right ! Thanks a lot =) |
| 2015-04-07 13:13:28 -0600 | asked a question | iterate through a matrice, int to uchar problem I'm trying to modify in a for a loop a Mat. I'm following this article. However the following code does not work : Printing Any help is appreciated. |
| 2015-04-07 06:25:36 -0600 | commented question | Using Sobel on label's of DistanceTransform You should add your comment as an answer so I can accept it =) |
| 2015-04-07 04:49:11 -0600 | commented question | Using Sobel on label's of DistanceTransform Thanks it solved my problem. But maybe you meant CV_32F ;) |
| 2015-04-06 22:46:26 -0600 | asked a question | Using Sobel on label's of DistanceTransform I'm trying to use Sobel on the Distance Transform label as a way to only have Voronoi lines in the resulting map. This is my code so far : But when I try to run this little program I hit this error : I don't really understand what it means and how I got this error... Any help is appreciated. |