|
2019-04-17 11:45:14 -0600
| received badge | ● Notable Question
(source)
|
|
2017-04-14 01:47:50 -0600
| received badge | ● Taxonomist
|
|
2017-04-06 06:46:48 -0600
| received badge | ● Popular Question
(source)
|
|
2012-12-06 15:23:01 -0600
| commented question | error LNK2019 with OpenCV e ARuco I've been googling it for hours and this kind of error refers to LINKER.. So I should link the aruco libraries to Linker, but there aren't .lib files in the package that I downloaded. |
|
2012-12-06 12:47:28 -0600
| asked a question | error LNK2019 with OpenCV e ARuco HI! I have a problem with Aruco Library. I downloaded Aruco from here: http://sourceforge.net/projects/aruco/
I'm on win7 x64 and I use VS2010.
I wrote this simple code: #include <iostream>
#include <stdio.h>
#include <string> // for strings
#include <iomanip> // for controlling float print precision
#include <sstream> // string to number conversion
#include "C:/Users/Cristina/Desktop/OpenCV/dep/aruco/src/aruco.h"
#include "C:/Users/Cristina/Desktop/OpenCV/dep/aruco/src/cvdrawingutils.h"
#include "C:/Users/Cristina/Desktop/OpenCV/dep/aruco/src/cameraparameters.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/include/opencv/cv.h"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/include/opencv/highgui.h"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/imgproc/include/opencv2/imgproc/imgproc.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/highgui/include/opencv2/highgui/highgui.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/core/include/opencv2/core/core.hpp"
using namespace cv;
using namespace aruco;
int main() {
aruco::CameraParameters CamParam;
aruco::MarkerDetector MDetector;
vector <Marker> Markers;
cv::Mat img;
img = imread("prova marker", 0);
cv::namedWindow("originale", 1);
cv::namedWindow("risultato", 1);
cv::Mat risultato;
img.copyTo(risultato);
MDetector.detect(img, Markers, CamParam, -1);
for (int i=0; i< Markers.size(); i++) {
Markers[i].draw(risultato, Scalar(0,0, 255));
}
cv::imshow("originale", img);
cv::imshow("risultato", risultato);
waitKey(0);
return 0;
}
But, when a click on Debug button, i receive a lot of warnings e this errors: 1>------ Inizio compilazione: Progetto: aruco marker, Configurazione: Debug Win32 ------
1>main.obj : error LNK2019: riferimento al simbolo esterno "public: __thiscall aruco::MarkerDetector::~MarkerDetector(void)" (??1MarkerDetector@aruco@@QAE@XZ) non risolto nella funzione _main
1>main.obj : error LNK2019: riferimento al simbolo esterno "public: void __thiscall aruco::Marker::draw(class cv::Mat &,class cv::Scalar_<double>,int,bool)const " (?draw@Marker@aruco@@QBEXAAVMat@cv@@V?$Scalar_@N@4@H_N@Z) non risolto nella funzione _main
1>main.obj : error LNK2019: riferimento al simbolo esterno "public: void __thiscall aruco::MarkerDetector::detect(class cv::Mat const &,class std::vector<class aruco::Marker,class std::allocator<class aruco::Marker> > &,class aruco::CameraParameters,float,bool)" (?detect@MarkerDetector@aruco@@QAEXABVMat@cv@@AAV?$vector@VMarker@aruco@@V?$allocator@VMarker@aruco@@@std@@@std@@VCameraParameters@2@M_N@Z) non risolto nella funzione _main
1>main.obj : error LNK2019: riferimento al simbolo esterno "public: __thiscall aruco::CameraParameters::CameraParameters(class aruco::CameraParameters const &)" (??0CameraParameters@aruco@@QAE@ABV01@@Z) non risolto nella funzione _main
1>main.obj : error LNK2019: riferimento al simbolo esterno "public: __thiscall aruco::MarkerDetector::MarkerDetector(void)" (??0MarkerDetector@aruco@@QAE@XZ) non risolto nella funzione _main
1>main.obj : error LNK2019: riferimento al simbolo esterno "public: __thiscall aruco::CameraParameters::CameraParameters(void)" (??0CameraParameters@aruco@@QAE@XZ) non risolto nella funzione _main
1>C:\Users\Cristina\Desktop\OpenCV\Progetti\MIEI PROGETTI\aruco marker\Debug\aruco marker.exe : fatal error LNK1120: 6 esterni non risolti
========== Compilazione: 0 completate, 1 non riuscite, 0 aggiornate, 0 ignorate ==========
I linked all possible opencv libraries (on linker-->input), but I have the same errors. Can someone help me? Thanks. |
|
2012-12-06 11:43:19 -0600
| commented question | error LNK2019 from C++ tutorial Hi! I have a similar problem (error LNK2019: ....) and also I'm on win7 x64. How i can change (step by step) the project settings to x64?? Thanks! |
|
2012-12-06 06:28:42 -0600
| answered a question | Feature Matching with FLANN - Exception on "nonfree_init.cpp" no idea why this exception? I also linked the nonfree (static) library (Project --> property --> Linker --> input --> additional directives). May be the cause? |
|
2012-12-04 06:34:28 -0600
| commented answer | Feature Matching with FLANN - Exception on "nonfree_init.cpp" I changed it as you suggested, but the problem remains .. It doesn't come in the main function, because doesn't print my test string (printf("uff\n")). |
|
2012-12-02 15:59:41 -0600
| asked a question | Feature Matching with FLANN - Exception on "nonfree_init.cpp" HI! I'm new to OpenCV. I use opencv 2.4.3 with Visual Studio 2010 Express on Windows 7.
To better understand OpenCV, I created a project on matching using SURF and FLANN. I just copied / pasted the code from the opencv tutorial. I report my code: #include <stdio.h>
#include <iostream>
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/core/include/opencv2/core/core.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/features2d/include/opencv2/features2d/features2d.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/highgui/include/opencv2/highgui/highgui.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/nonfree/include/opencv2/nonfree/features2d.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/nonfree/include/opencv2/nonfree/nonfree.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/nonfree/src/surf.cpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/nonfree/src/sift.cpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/nonfree/src/nonfree_init.cpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/calib3d/include/opencv2/calib3d/calib3d.hpp"
#include "C:/Users/Cristina/Desktop/OpenCV/opencv/modules/imgproc/include/opencv2/imgproc/imgproc.hpp"
using namespace std;
using namespace cv;
int main()
{
Mat img_1 = cvLoadImage( "box.png", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = cvLoadImage( "box_in_scene.png", CV_LOAD_IMAGE_GRAYSCALE );
namedWindow("Good Matches", CV_WINDOW_AUTOSIZE);
imshow("Good Matches",img_1);
namedWindow("Good Matches1", CV_WINDOW_AUTOSIZE);
imshow("Good Matches1",img_2);
if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl;
system("pause");
return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
cv::initModule_nonfree();
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
vector<KeyPoint> keypoints_1, keypoints_2;
printf("arriva qui 1\n");
detector.detect( img_1, keypoints_1);
printf("arriva qui 2\n");
detector.detect( img_2, keypoints_2 );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{ if( matches[i].distance < 2*min_dist )
{ good_matches.push_back( matches[i]); }
}
//-- Draw only "good" matches
Mat img_matches;
drawMatches( img_1, keypoints_1, img_2, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Show detected matches
namedWindow("Good Matches2",CV_WINDOW_AUTOSIZE);
imshow( "Good Matches2", img_matches );
for( int i = 0; i < (int)good_matches.size(); i++ )
{ printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); }
waitKey(0);
return 0;
}
When I run my project, I get this exception about (I suppose) "nonfree_init.cpp" file:
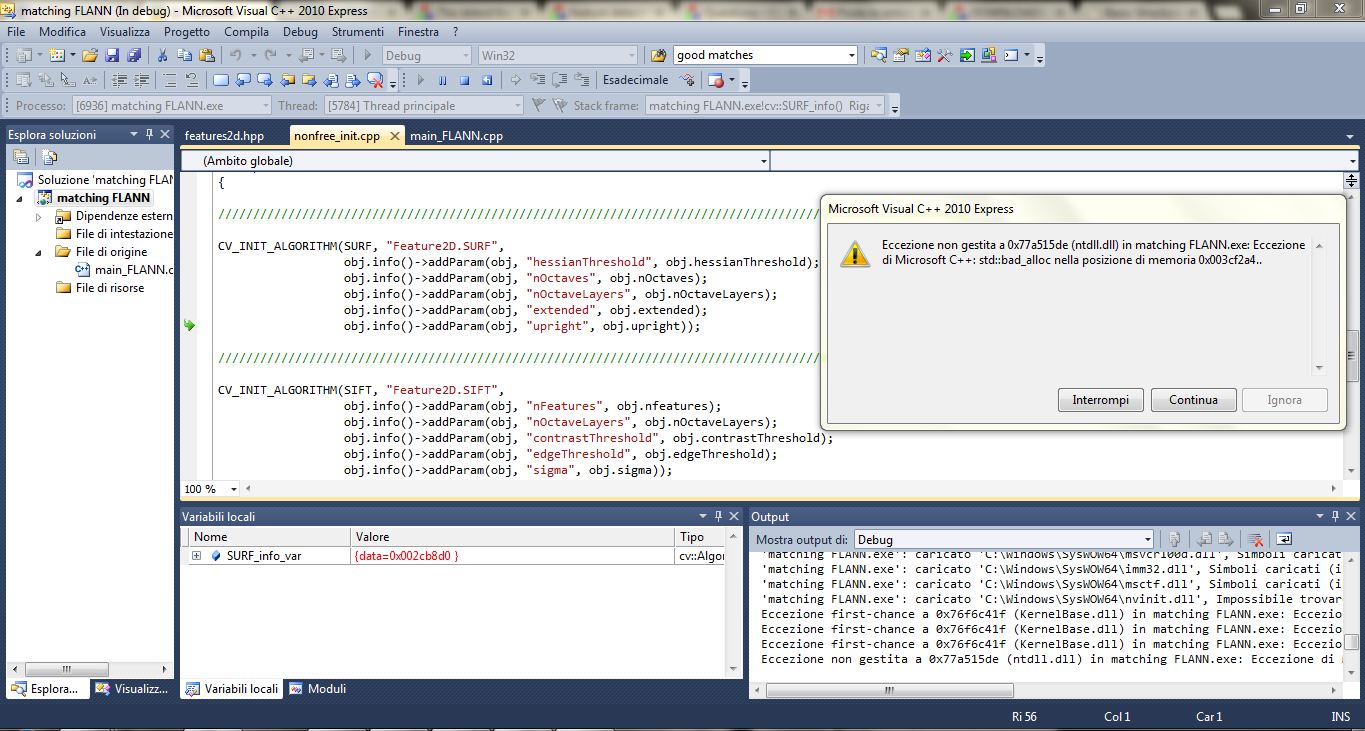 (it seems to me that just does not come in the ... (more) |
|
2012-12-02 15:10:27 -0600
| commented answer | Problems with ALL_BUILD (error with vs2010) |
|
2012-12-02 14:09:54 -0600
| received badge | ● Critic
(source)
|
|
2012-12-02 14:09:42 -0600
| received badge | ● Supporter
(source)
|
|
2012-11-25 17:24:11 -0600
| received badge | ● Editor
(source)
|
|
2012-11-25 16:26:35 -0600
| asked a question | Problems with ALL_BUILD (error with vs2010) H HI! I'm new to OpenCV .. I installed OpenCV 2.4.3 on Windows 7 with Visual Studio 2010 Express from this guide: http://docs.opencv.org/doc/tutorials/introduction/windows_install/windows_install.html And everything went ok up to step 7. Here when I open the solution 'OpenCV' and I try to debug it, I get this error: Unable to start program C:\Users\Cristina\Desktop\OpenCV\Progetti\Debug\ALL_BUILD
Cannot find the specified file The ALL_BUILD program is in: C:\Users\Cristina\Desktop\OpenCV\Progetti, so I copied it in C:\Users\Cristina\Desktop\OpenCV\Progetti\Debug, but I still get the same error. Can someone help me?? Thanks in advance |