This forum is disabled, please visit https://forum.opencv.org
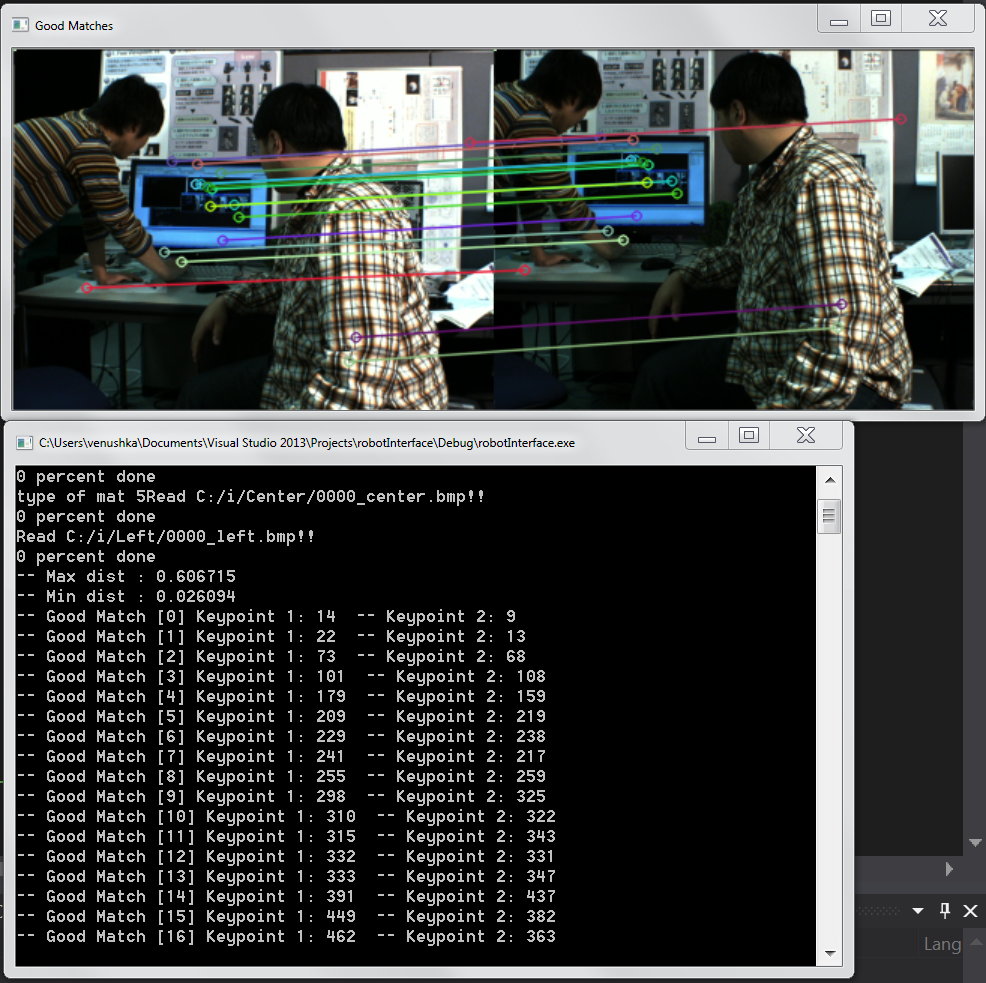
| 2016-08-29 07:14:58 -0600 | asked a question | Clarification about incorrect image matching points in SIFT I detected sift key points of two images. (two images have the same scene, but different view angle) after that I did matching of key points. To remove the bad matching I used RANSAC. Most of the matching's are correct. But still I have bad matching. But for research purpose I need to identify why bad matching happens. |
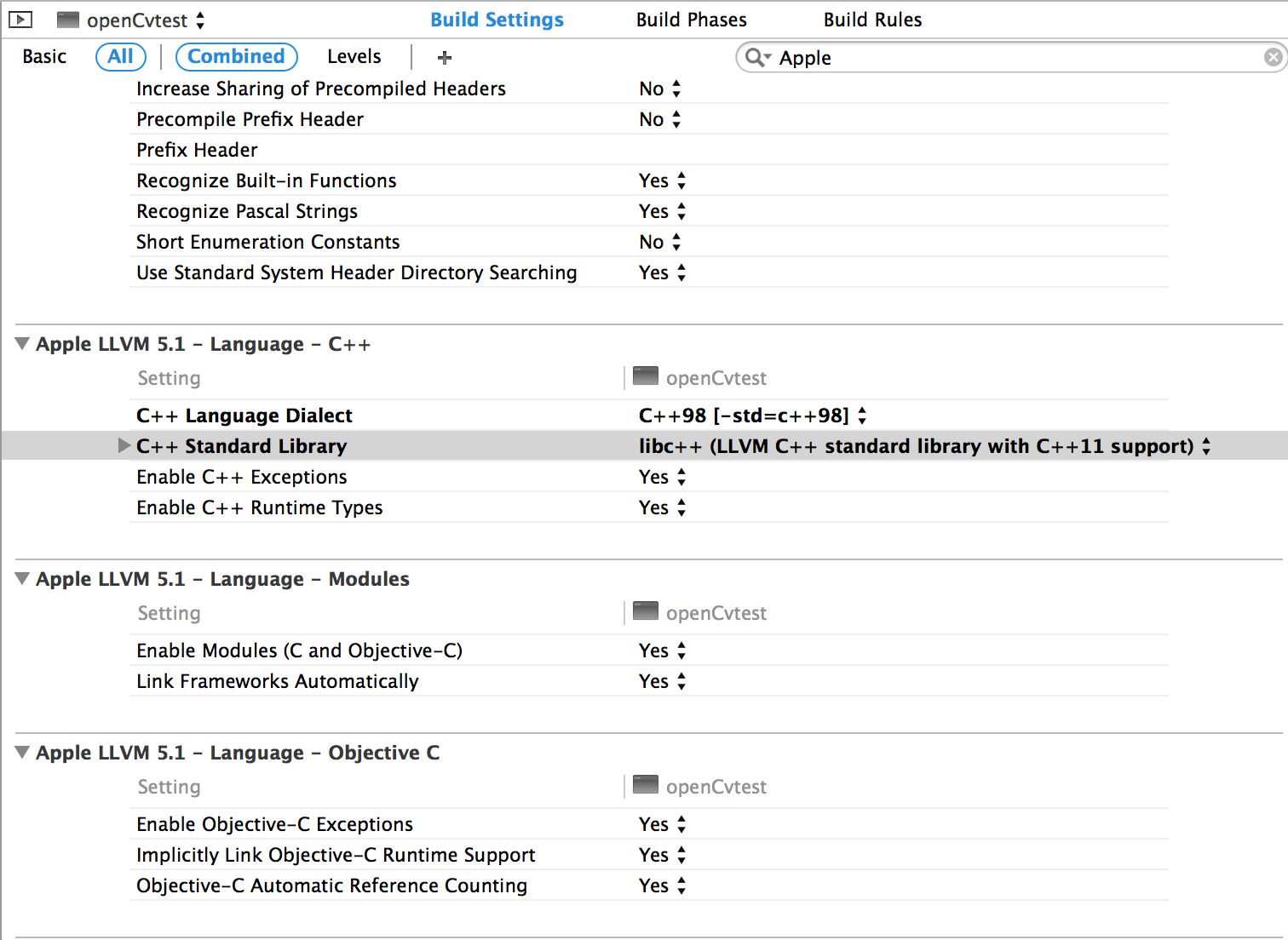
| 2016-07-03 18:53:40 -0600 | asked a question | error C2065: 'SiftFeatureDetector' : undeclared identifier I'm trying to use SiftFeatureDetector but i'm having undeclared identifier error. But i imported the libraries as follows. Any help is appreciated. ( i followed article -> (http://www.mattsheckells.com/opencv-a...) imported libraries I'm using opencv 2.4 |
| 2015-04-14 23:56:50 -0600 | commented question | stereoRectifyUncalibrated function error @berak i have clearly mentioned my Error. would you please take a took at it . thank you. |
| 2015-04-14 07:45:26 -0600 | commented question | stereoRectifyUncalibrated function error @berak please find below the link of my image http://i.imgur.com/l621PQp.jpg which has the error im getting . could you please select the "(more)" . thank you. |
| 2015-04-14 00:13:19 -0600 | received badge | ● Enthusiast |
| 2015-04-13 23:38:46 -0600 | asked a question | stereoRectifyUncalibrated function error I'm new to opencv and its developing. i used SIFT descriptor and FLANN matcher to identify the good key points.
I'm using Flea2 camera images. I dont have insentric parameters. so i moved to Error :Assertion failed: (unsigned)CV_MAT_DEPTH(type) <= CV_64F, file C :\builds\2_4_PackSlave-win32-vc12-shared\opencv\modules\core\include\opencv2/cor e/types_c.h, line 737
please find below the code i used. |
| 2015-04-05 06:10:10 -0600 | asked a question | How do i create 3D points to save my model as .ply file( Meshlab file) I'm developing 3D based application. There i used a Stereo( left image and right image) in order to match the corresponding pixels i used
Up to that code has good matches. I need to write ply file.(display in meshlab) in order to do that how do i take 3D points ? I've already have Camera Baseline, Focal length, and matching coordinates of two images. Any help is appreciated. thank you.
|
| 2014-07-26 12:35:56 -0600 | received badge | ● Editor (source) |
| 2014-07-26 12:34:28 -0600 | asked a question | Opencv My first programme on Xcode Linker Errors I'm new to
|