I'm currently trying to develop a ArUco cube detector for a project. The goal is to have a more stable and accurate pose estimation without using a large ArUco board. For this to work however, I need to know the orientation of each of the markers. Using the draw3dAxis method, I discovered that the X and Y axis did not consistently appear in the same location. Here is a video demonstrating the issue: https://youtu.be/gS7BWKm2nmg
It seems to be a problem with the Rvec detection. There is a clear shift in the first two values of the Rvec, which will stay fairly consistent until the axis swaps. When this axis swap happens the values can change by a magnitude anywhere from 2-6. The ARuco library does try to deal with rotations as shown in the Marker.calculateMarkerId() method:
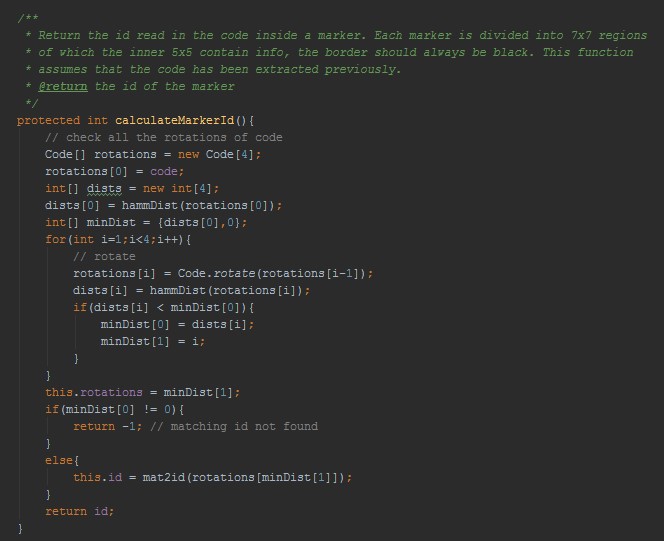
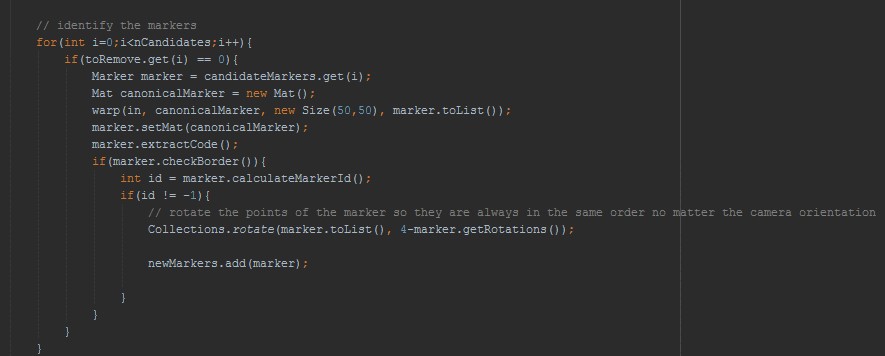
and the MarkerDetector.detect() does call that method and uses the getRotations() Method:
I am using OpenCV 2.4.11 If anyone has any advice or solutions I'd be very gracious. Please contact me if you have any questions.