Hi,
I have this 2 images :
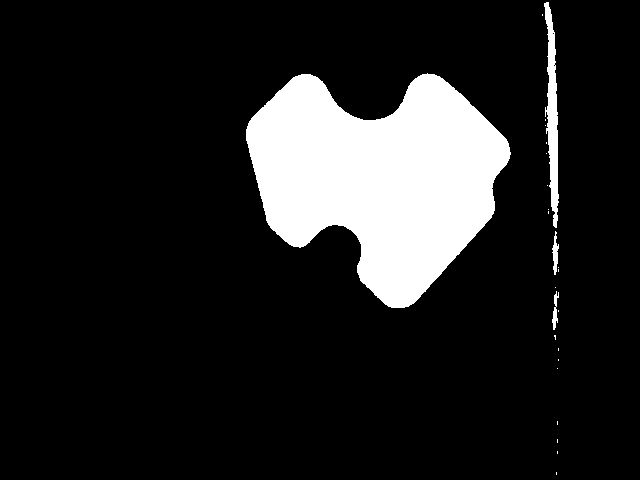
and
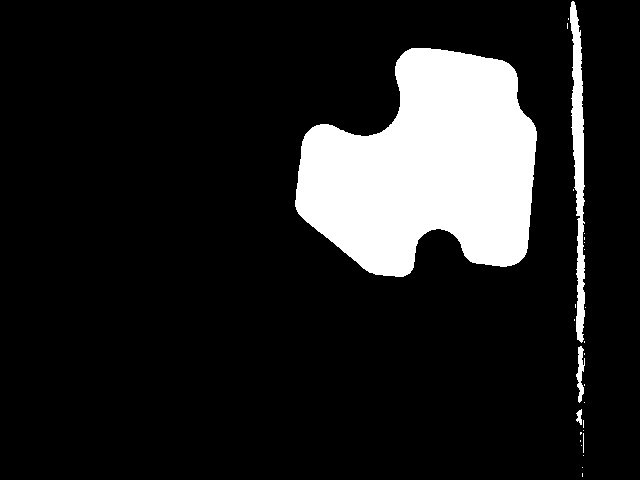
I want to calculate the rotation and translation between the two objects (the long vertical object is noise). How can I do that? I try estimateRigidTransform and I get a 3x2 matrix like this :
[[ 9.74271490e-01 -5.10741683e-02 2.52325933e+01] [ 1.05148056e-02 1.01445292e+00 -8.42995582e+00]]
I think that this matrix is like this :
[[ cos(angle) sin(angle) tranlation_X] [-sin(angle) cos(angle) translation_Y]]
But 9.74271490e-01 is different from 1.01445292e+00, so, what does it means?
Is estimateRigidTransform the best (only) solution?
Best regards,
Philippe