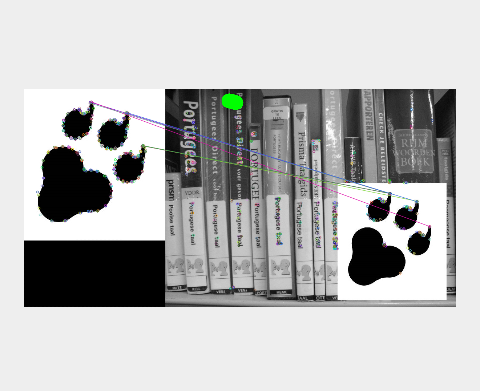
I have implemented the C++ code found here in Java. However, it does not seem to work as I am getting this instead of a nice green outline around the detected image. Can anyone point out where the problem is?
{kind=link}
My code is as following (and it's not the most beautiful one because of the so many needed conversions):
Note I am doing this matching with multiple images and the best matching (and other things) is stored at index 'bestMatch'; so in the scene image (index 0), I am looking for the best image match stored at index 1 to n, with bestMatch deemed best based on shortest distance.
//get the best match and show the matching with the original picture
Mat matOut = new Mat();
MatOfDMatch finalMatchess = new MatOfDMatch();
DMatch[] finalMatches = new DMatch[goodMatches[bestMatch].size()]; //goodMatches contains the matches with 3*min_dist as in the C++ code
for (int x=0;x<goodMatches[bestMatch].size();x++) {
finalMatches[x] = goodMatches[bestMatch].get(x);
}
finalMatchess.fromArray(finalMatches);
Features2d.drawMatches(mats[bestMatch],keyPoints[bestMatch],mats[0],keyPoints[0],finalMatchess,matOut);
// stored the indexes for the good matches
int[] usedQueryIds = new int[goodMatches[bestMatch].size()];
int[] usedTrainIds = new int[goodMatches[bestMatch].size()];
for (int x=0;x<goodMatches[bestMatch].size();x++) {
usedQueryIds[x] = goodMatches[bestMatch].get(x).queryIdx;
usedTrainIds[x] = goodMatches[bestMatch].get(x).trainIdx;
}
//get the points used in the matching
Point[] kpBox = new Point[goodMatches[bestMatch].size()];
Point[] kpBox2 = new Point[goodMatches[bestMatch].size()];
KeyPoint[] kpp = keyPoints[bestMatch].toArray();
for (int q=0;q<kpBox.length;q++) {
kpBox[q] = kpp[usedQueryIds[q]].pt;
kpBox2[q] = kp[usedTrainIds[q]].pt;
}
MatOfPoint2f bla = new MatOfPoint2f();
MatOfPoint2f bla2 = new MatOfPoint2f();
bla.fromArray(kpBox);
bla2.fromArray(kpBox2);
Mat H = Calib3d.findHomography(bla,bla2,Calib3d.RANSAC,5.);
//create the points at the corners
List<Point> corners = new ArrayList<Point>();
corners.add(new Point(0,0));
corners.add(new Point(mats[bestMatch].cols(),0));
corners.add(new Point(mats[bestMatch].cols(),mats[bestMatch].rows()));
corners.add(new Point(0,mats[bestMatch].rows()));
List<Point> sceneCorners = new ArrayList<Point>();
//conversions
MatOfPoint2f cornersMat = new MatOfPoint2f();
cornersMat.fromList(corners);
MatOfPoint2f sceneCornersMat = new MatOfPoint2f();
sceneCornersMat.fromList(sceneCorners);
Core.perspectiveTransform(cornersMat,sceneCornersMat,H);
Point[] list = sceneCornersMat.toArray();
Log.d(TAG,list[0].x + ",," + list[0].y); //HERE they are too close together, not even forming a square
Log.d(TAG,list[1].x + ",," + list[1].y);
Log.d(TAG,list[2].x + ",," + list[2].y);
Log.d(TAG,list[3].x + ",," + list[3].y);
sceneCornersMat.put(0,0, sceneCornersMat.get(0,0)[0] + mats[bestMatch].cols(),sceneCornersMat.get(0,0)[1]);
sceneCornersMat.put(1,0, sceneCornersMat.get(1,0)[0] + mats[bestMatch].cols(),sceneCornersMat.get(1,0)[1]);
sceneCornersMat.put(2,0, sceneCornersMat.get(2,0)[0] + mats[bestMatch].cols(),sceneCornersMat.get(2,0)[1]);
sceneCornersMat.put(3,0, sceneCornersMat.get(3,0)[0] + mats[bestMatch].cols(),sceneCornersMat.get(3,0)[1]);
Imgproc.line(matOut,new Point(sceneCornersMat.get(0,0)),new Point(sceneCornersMat.get(1,0)), new Scalar(0,255,0),40);
Imgproc.line(matOut,new Point(sceneCornersMat.get(1,0)),new Point(sceneCornersMat.get(2,0)), new Scalar(0,255,0),40);
Imgproc.line(matOut,new Point(sceneCornersMat.get(2,0)),new Point(sceneCornersMat.get(3,0)), new Scalar(0,255,0),40);
Imgproc.line(matOut,new Point(sceneCornersMat.get(3,0)),new Point(sceneCornersMat.get(1,0)), new Scalar(0,255,0),40);