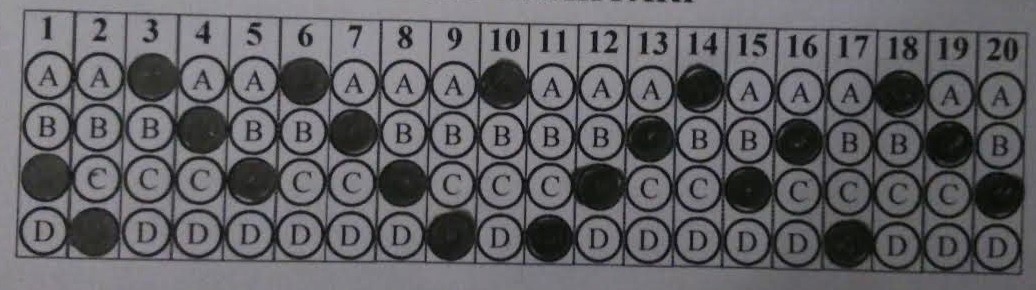
I can detect largest contour the answer sheet (20 questions, each have 4 alternative)
After the draw largest contour, what shall I do?
Divide matris the rectangle by 20x4 cell? Or find countour again but this time inside the rectangle?
I dont know what I need. Just I want to get which is marked.
public Mat onCameraFrame(CameraBridgeViewBase.CvCameraViewFrame inputFrame) {
return findLargestRectangle(inputFrame.rgba());
}
private Mat findLargestRectangle(Mat original_image) {
Mat imgSource = original_image;
hierarchy = new Mat();
//convert the image to black and white
Imgproc.cvtColor(imgSource, imgSource, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.Canny(imgSource, imgSource, 50, 50);
//apply gaussian blur to smoothen lines of dots
Imgproc.GaussianBlur(imgSource, imgSource, new Size(5, 5), 5);
//find the contours
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(imgSource, contours, hierarchy, Imgproc.RETR_LIST, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
double maxArea = -1;
int maxAreaIdx = -1;
MatOfPoint temp_contour = contours.get(0); //the largest is at the index 0 for starting point
MatOfPoint2f approxCurve = new MatOfPoint2f();
Mat largest_contour = contours.get(0);
List<MatOfPoint> largest_contours = new ArrayList<MatOfPoint>();
for (int idx = 0; idx < contours.size(); idx++) {
temp_contour = contours.get(idx);
double contourarea = Imgproc.contourArea(temp_contour);
//compare this contour to the previous largest contour found
if (contourarea > maxArea) {
//check if this contour is a square
MatOfPoint2f new_mat = new MatOfPoint2f( temp_contour.toArray() );
int contourSize = (int)temp_contour.total();
Imgproc.approxPolyDP(new_mat, approxCurve, contourSize*0.05, true);
if (approxCurve.total() == 4) {
maxArea = contourarea;
maxAreaIdx = idx;
largest_contours.add(temp_contour);
largest_contour = temp_contour;
}
}
}
MatOfPoint temp_largest = largest_contours.get(largest_contours.size()-1);
largest_contours = new ArrayList<MatOfPoint>();
largest_contours.add(temp_largest);
Imgproc.cvtColor(imgSource, imgSource, Imgproc.COLOR_BayerBG2RGB);
Imgproc.drawContours(imgSource, contours, maxAreaIdx, new Scalar(0, 255, 0), 1);
Log.d(TAG, "Largers Contour:" + contours.get(maxAreaIdx).toString());
return imgSource;
}
UPDATE 1:
I want to thank you @sturkmen for the his answer.
I can read and find black regions now. Here the Android codes:
public View onCreateView(LayoutInflater inflater, ViewGroup container,
Bundle savedInstanceState) {
View _view = inflater.inflate(R.layout.fragment_main, container, false);
// Inflate the layout for this fragment
Button btnTest = (Button) _view.findViewById(R.id.btnTest);
btnTest.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
Mat img = Imgcodecs.imread(mediaStorageDir().getPath() + "/" + "test2.jpg");
if (img.empty()) {
Log.d("Fragment", "IMG EMPTY");
}
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1, CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
//show image
showImage(quad);
//store image
storeImage(quad);
}
});
return _view;
}
public void showImage (Mat img) {
ImageView imgView = (ImageView) getActivity().findViewById(R.id.sampleImageView);
//Mat mRgba = new Mat();
//mRgba = Utils.loadResource(MainAct.this, R.drawable.your_image,Highgui.CV_LOAD_IMAGE_COLOR);
Bitmap img2 = Bitmap.createBitmap(img.cols(), img.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(img, img2);
imgView.setImageBitmap(img2);
}
public File mediaStorageDir () {
File _mediaStorageDir = new File(Environment.getExternalStorageDirectory()
+ "/Android/data/"
+ getActivity().getApplicationContext().getPackageName());
return _mediaStorageDir;
}
public void storeImage(Mat matImg) {
Bitmap bitmapImg = Bitmap.createBitmap(matImg.cols(), matImg.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(matImg, bitmapImg);
String timeStamp = new SimpleDateFormat("ddMMyyyy_HHmm").format(new Date());
File mediaFile;
String mImageName="IMG_"+ timeStamp +".jpg";
mediaFile = new File(mediaStorageDir().getPath() + File.separator + mImageName);
File pictureFile = mediaFile;
try {
FileOutputStream fos = new FileOutputStream(pictureFile);
bitmapImg.compress(Bitmap.CompressFormat.PNG, 90, fos);
fos.close();
} catch (FileNotFoundException e) {
Log.d("FragmentMain", "File not found: " + e.getMessage());
} catch (IOException e) {
Log.d("FragmentMain", "Error accessing file: " + e.getMessage());
}
}