Hi,
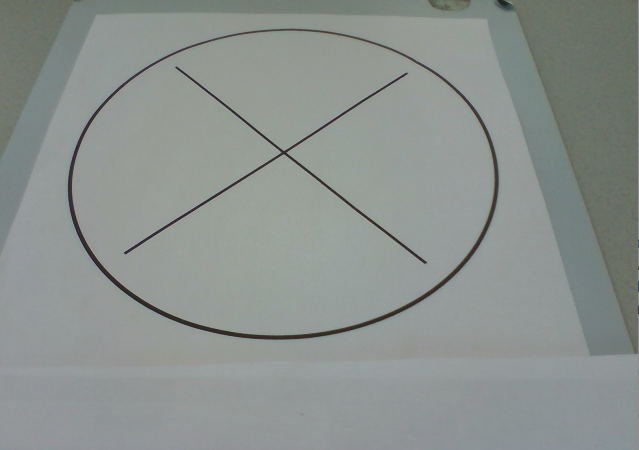
I am currently trying to find a solution on how to track a specific target which looks like this:

It is just a circle with a cross inside.
I am using opencv 2.4.8 in ROS Indigo on Ubuntu 14.04 Currently I am at this point:
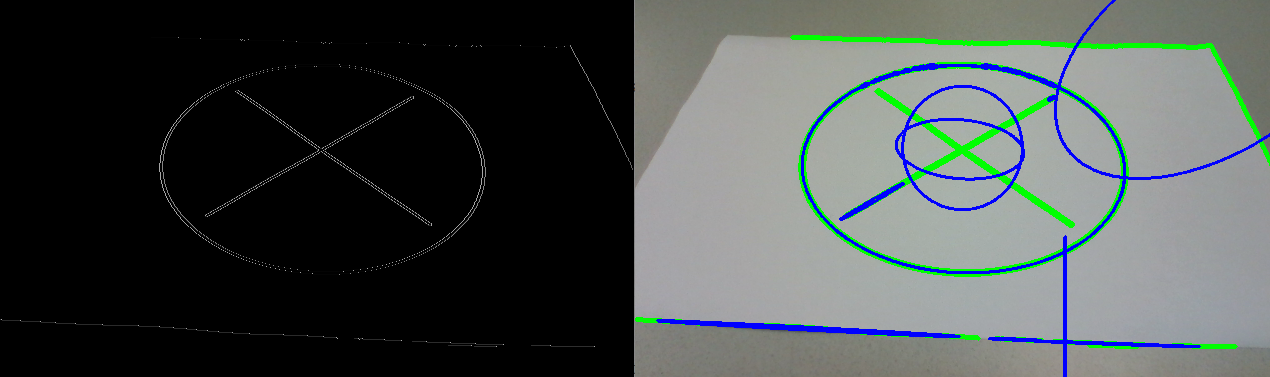
- apply Canny-Edge-detection on the frames
- find and draw contours (drawing mostly for debugging purposes)
- for each contour calculate the eccentricity like this:
I wanted to use the eccentricity to filter out most of the fitted ellipses which are very narrow and are not even close to a circle. But I can not calculate moments from the ellipses, but only from the contours. And I have no idea if this comes even close to what I want to achieve.
Is there another possibility to calculate the eccentricity or the roundness of the fitted ellipses? I think the I tried googling it and this was the most promising approach.
Am I at least on a right way to get this working anytime? Or is there another approach which would work better and/or more stable. I need a robust tracking algorithm which also works in non-perfect lightning conditions and also works if the circle is no perfect circle anymore in the picture (because the camera is not always perfectly perpendicular to the circle)
I already sorted out the following methods, which all do not work for some reasons
- Shape-Matching
- Template-Matching
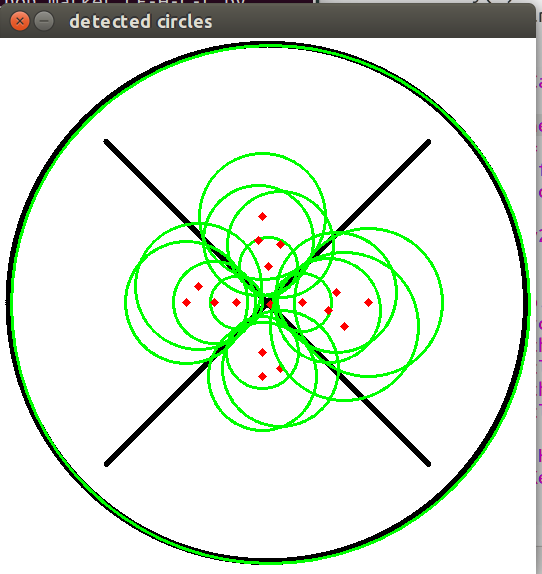
- Hough Circle Transform (at most perfect circles are detected)
If there are more information I should provide or something I should clarify, please feel free to ask. Sorry if this post should be a little messy, I hope you got me anyway.
{kind=link}
{kind=link}