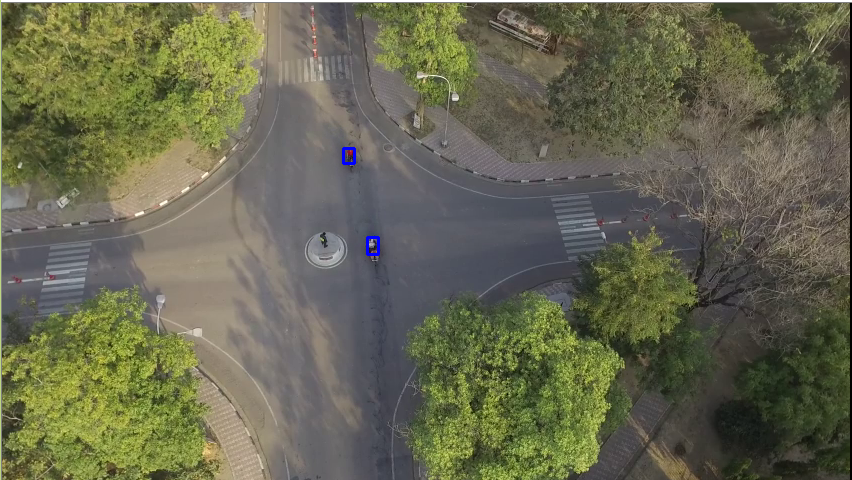
My project requires me to track road traffic parameters from a stationary camera.
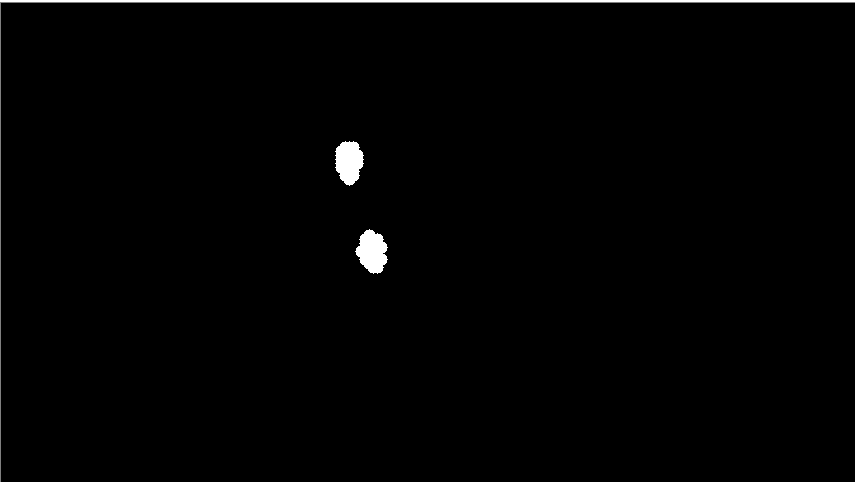
I have tracked moving features using optical flow farneback algorithm, created a binary image with white blob on the moving object. Now, my want to classify them as cars or motorbikes.
I tried using the blob area but the problem is the contour/blob area increases or decreases as the object comes closer or away from the camera.
Any suggestion on how can I tackle this issue?