Hello!
I have a little problem with som projection and geometry. I have an image where I detect a square. After the square detection, I crop the square from image. In the ROI I detect the point P(x,y) (see the image below).
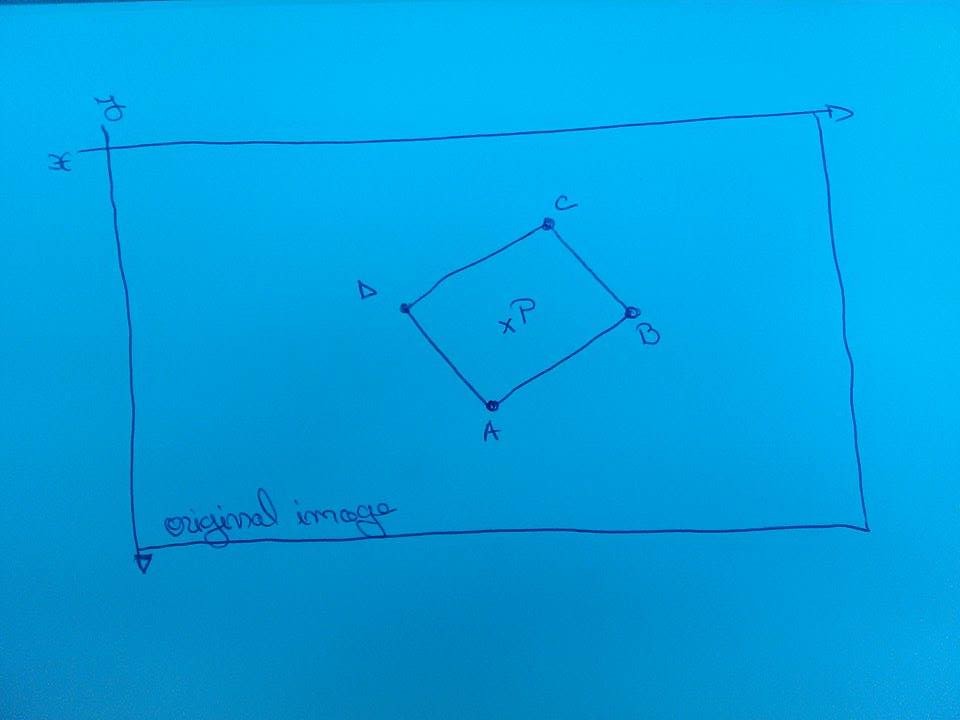
My problem is that I know the coordinate of point P in the ROI, the coordinates of A,B,C,D, and rotation of ROI (RotatedRect::angle) but i want to get the coordinate of P in original image. Any advice could help.
Thanks you!