Hello, I am trying to use the surf algoritm with opencv 3.1 , but it still note working for me without any error this is the c++ algorithm of surf:: https://github.com/doczhivago/rtObjectRecognition/blob/master/main.cpp
I add the necessery modification for opencv 3.1 version like this example:: http://answers.opencv.org/question/55247/image-registration-opencv-300/
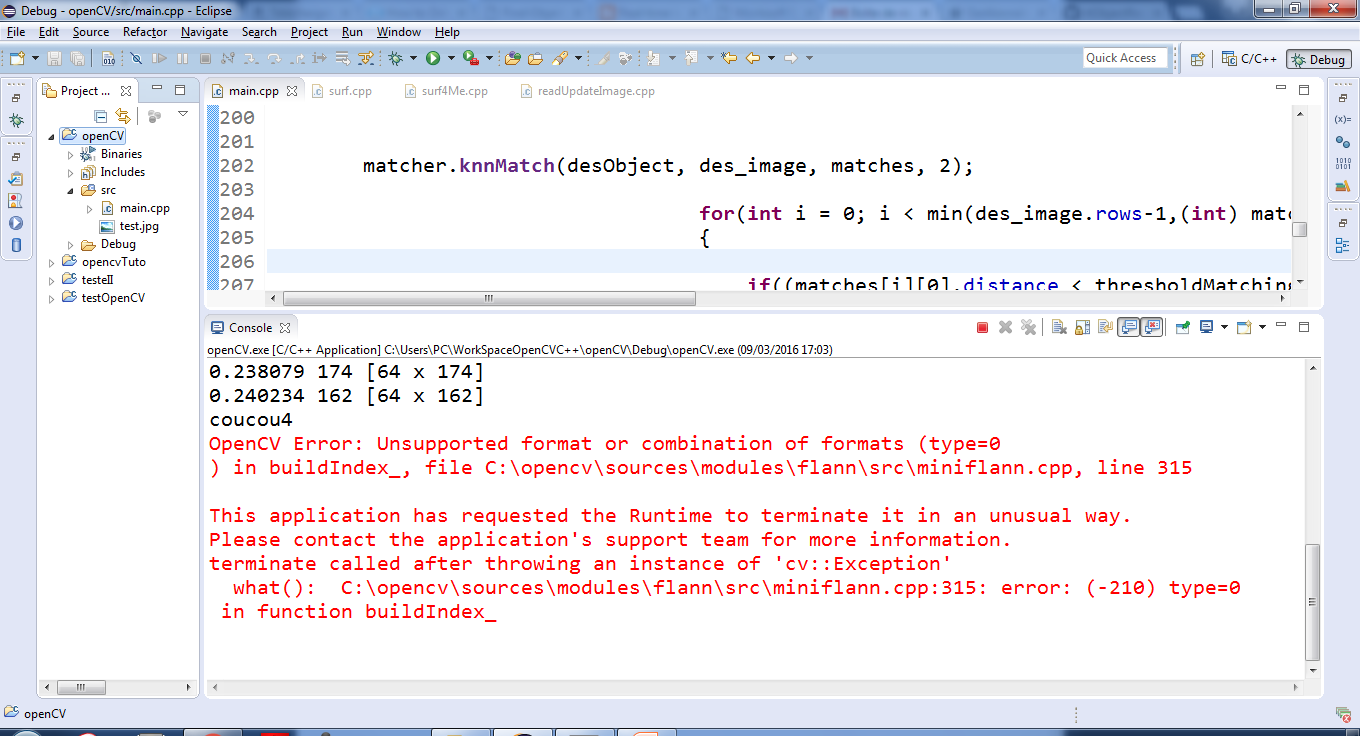
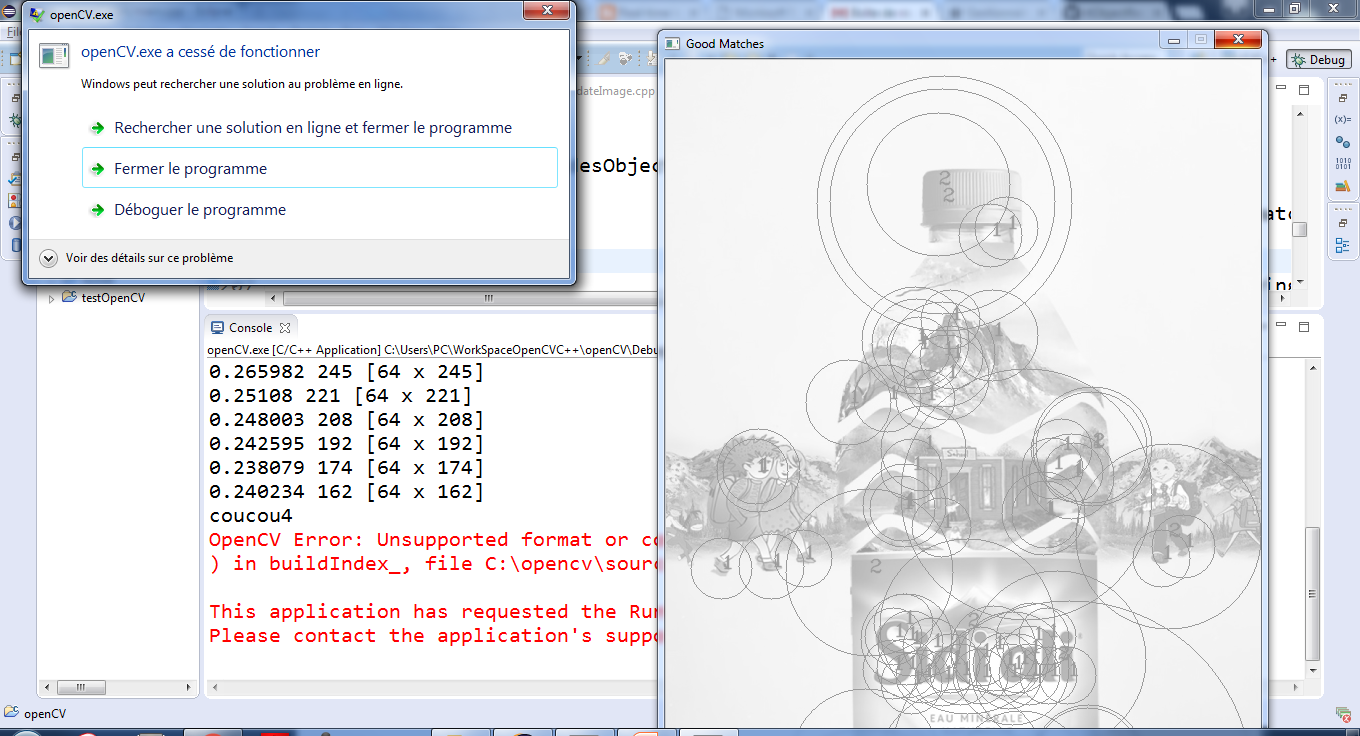
When I execute the code this is the result :
this my code of surf algorithm with the necessery modification for opencv 3.1 version
// /*# include <iostream> # include <fstream> # include <string> # include <opencv2 core="" core.hpp=""> # include <opencv2 highgui="" highgui.hpp=""> # include <opencv2 opencv.hpp=""> # include "opencv2/features2d/features2d.hpp" # include "opencv2/imgproc/imgproc.hpp" # include "opencv2/calib3d/calib3d.hpp" # include "opencv2\xfeatures2d\nonfree.hpp" # include "opencv2\xfeatures2d\cuda.hpp" # include "opencv2\xfeatures2d\xfeatures2d.hpp"
//Name spaces used using namespace cv; using namespace std;*/
int main()
{
//turn performance analysis functions on if testing = true
bool testing=false;
double t; //timing variable
//load training image
Mat object = imread ("C:/opencvInputOutput/test.jpg", CV_LOAD_IMAGE_GRAYSCALE);
if (!object.data){
cout<<"Can't open image";
return -1;
}
namedWindow("Good Matches", CV_WINDOW_AUTOSIZE);
//SURF Detector, and descriptor parameters
int minHess=3000;
vector<KeyPoint> kpObject, kpImage;
Mat desObject, desImage;
//Performance measures calculations for report
if (testing)
{
cout<<object.rows<<" "<<object.cols<<endl;
//calculate integral image
Mat iObject;
integral(object, iObject);
imshow("Good Matches", iObject);
imwrite("C:/opencvInputOutput/IntegralImage.jpg", iObject);
cvWaitKey(0);
//calculate number of interest points, computation time as f(minHess)
int minHessVector[]={100, 500, 1000, 1500, 2000, 2500, 3000,
3500, 4000, 4500, 5000, 5500, 6000, 6500, 7000, 7500,
8000, 8500, 9000, 9500, 10000};
int minH;
std::ofstream file;
file.open("C:/opencvInputOutput/TimingC.csv", std::ofstream::out);
for (int i=0; i<20; i++)
{
minH=minHessVector[i];
t = (double)getTickCount();
//viens d'étre ajouter spécifique à opencv version 3.1
Ptr<xfeatures2d::SURF> surf = xfeatures2d::SURF::create(minH);
//version 2.4.10
//SurfFeatureDetector detector(minH);
//detector.detect(object, kpObject); for 2.4.10 version
//for 3.1.0 version
surf->detectAndCompute(object, Mat(), kpObject, desObject);
surf->detectAndCompute(object, Mat(), kpImage, desImage);
t = ((double)getTickCount() - t)/getTickFrequency();
file<<minHess<<","<<kpObject.size()<<","<<t<<",";
cout<<t<<" "<<kpObject.size()<<" "<<desObject.size()<<endl;
t = (double)getTickCount();
//SurfDescriptorExtractor extractor;
//extractor.compute(object, kpObject, desObject);
t = ((double)getTickCount() - t)/getTickFrequency();
file<<t<<endl;
}
file.close();
//Display keypoints on training image
Mat interestPointObject=object;
for (unsigned int i=0; i<kpObject.size();i++)
{
if(kpObject[i].octave)
{
circle(interestPointObject,kpObject[i].pt,kpObject[i].size,0);
string octaveS;
switch(kpObject[i].octave)
{
case 0:
octaveS="0";
break;
case 1:
octaveS='1';
break;
case 2:
octaveS='2';
break;
default:
break;
}
putText(interestPointObject, octaveS, kpObject[i].pt,
FONT_HERSHEY_COMPLEX_SMALL, 1, cvScalar(0,0,250), 1, CV_AA);
}
}
imshow("Good Matches",interestPointObject);
imwrite("C:/opencvInputOutput/bookIP2.jpg", interestPointObject);
cvWaitKey(0);
}
//SURF Detector, and descriptor parameters, match object initialization
minHess=2000;
Ptr<xfeatures2d::SURF> surf = xfeatures2d::SURF::create(minHess);
surf->detectAndCompute(object, Mat(), kpObject, desObject);
surf->detectAndCompute(object, Mat(), kpImage, desImage);
/*SurfFeatureDetector detector(minHess);
detector.detect(object, kpObject);
SurfDescriptorExtractor extractor;
extractor.compute(object, kpObject, desObject);*/
FlannBasedMatcher matcher;
//Initialize video and display window
VideoCapture cap(1); //camera 1 is webcam
if (!cap.isOpened()) return -1;
//Object corner points for plotting box
vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( object.cols, 0 );
obj_corners[2] = cvPoint( object.cols, object.rows );
obj_corners[3] = cvPoint( 0, object.rows );
//video loop
char escapeKey='k';
double frameCount = 0;
float thresholdMatchingNN=0.7;
unsigned int thresholdGoodMatches=4;
unsigned int thresholdGoodMatchesV[]={4,5,6,7,8,9,10};
for (int j=0; j<7;j++){
thresholdGoodMatches=thresholdGoodMatchesV[j];
//thresholdGoodMatches=8;
cout<<thresholdGoodMatches<<endl;
if(true)
{
t = (double)getTickCount();
}
while (escapeKey != 'q')
{
frameCount++;
Mat frame;
Mat image;
cap>>frame;
cvtColor(frame, image, CV_RGB2GRAY);
Mat des_image, img_matches, H;
vector<KeyPoint> kp_image;
vector<vector<DMatch > > matches;
vector<DMatch> good_matches;
vector<Point2f> obj;
vector<Point2f> scene;
vector<Point2f> scene_corners(4);
//version 3.1.0
surf->detectAndCompute(image, Mat(), kpObject, desObject);
surf->detectAndCompute(image, Mat(), kpImage, desImage);
//version 2.4.10
//detector.detect( image, kp_image );
//extractor.compute( image, kp_image, des_image );
matcher.knnMatch(desObject, des_image, matches, 2);
for(int i = 0; i < min(des_image.rows-1,(int) matches.size()); i++) //THIS LOOP IS SENSITIVE TO SEGFAULTS
{
if((matches[i][0].distance < thresholdMatchingNN*(matches[i][1].distance)) && ((int) matches[i].size()<=2 && (int) matches[i].size()>0))
{
good_matches.push_back(matches[i][0]);
}
}
//if (good_matches.size()<1)
// good_matches.resize(0,cv::DMatch);
//Draw only "good" matches
drawMatches( object, kpObject, image, kp_image, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
if (good_matches.size() >= thresholdGoodMatches)
{
//Display that the object is found
putText(img_matches, "Object Found", cvPoint(10,50),FONT_HERSHEY_COMPLEX_SMALL, 2, cvScalar(0,0,250), 1, CV_AA);
for(unsigned int i = 0; i < good_matches.size(); i++ )
{
//Get the keypoints from the good matches
obj.push_back( kpObject[ good_matches[i].queryIdx ].pt );
scene.push_back( kp_image[ good_matches[i].trainIdx ].pt );
}
H = findHomography( obj, scene, CV_RANSAC );
perspectiveTransform( obj_corners, scene_corners, H);
//Draw lines between the corners (the mapped object in the scene image )
line( img_matches, scene_corners[0] + Point2f( object.cols, 0), scene_corners[1] + Point2f( object.cols, 0), Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + Point2f( object.cols, 0), scene_corners[2] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + Point2f( object.cols, 0), scene_corners[3] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + Point2f( object.cols, 0), scene_corners[0] + Point2f( object.cols, 0), Scalar( 0, 255, 0), 4 );
}
else
{
putText(img_matches, "", cvPoint(10,50), FONT_HERSHEY_COMPLEX_SMALL, 3, cvScalar(0,0,250), 1, CV_AA);
}
//Show detected matches
imshow( "Good Matches", img_matches );
escapeKey=cvWaitKey(10);
//imwrite("C:/School/Image Processing/bookIP3.jpg", img_matches);
if(frameCount>10)
escapeKey='q';
}
//average frames per second
if(true)
{
t = ((double)getTickCount() - t)/getTickFrequency();
cout<<t<<" "<<frameCount/t<<endl;
cvWaitKey(0);
}
frameCount=0;
escapeKey='a';
}
//Release camera and exit
cap.release();
return 0;
}
this is the result that I m looking for
http://frankbergschneider.weebly.com/home/real-time-object-recognition-using-surf-algorithm-in-opencv-eel6562-course-project
Thanks :)
 (/upfiles/14576105383468417.png)
(/upfiles/14576105383468417.png)