Hi
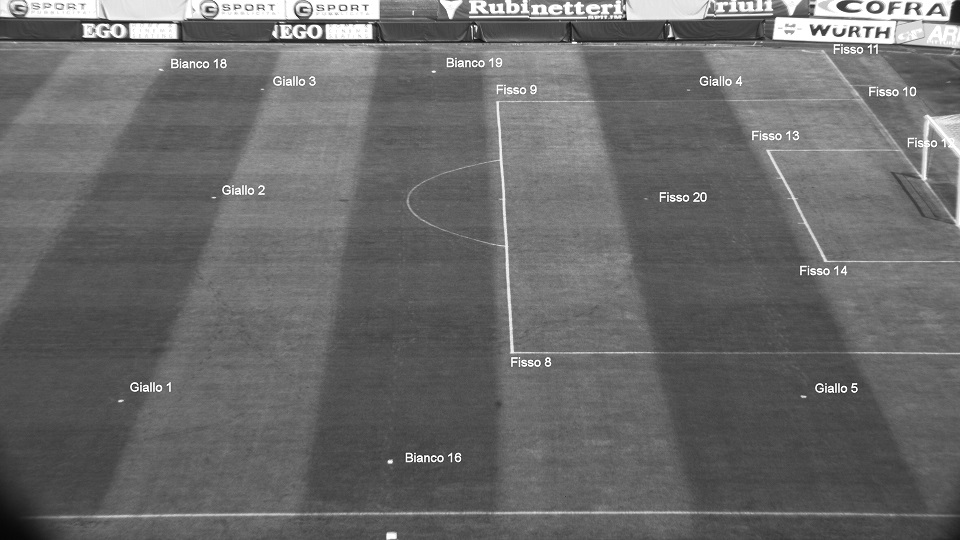
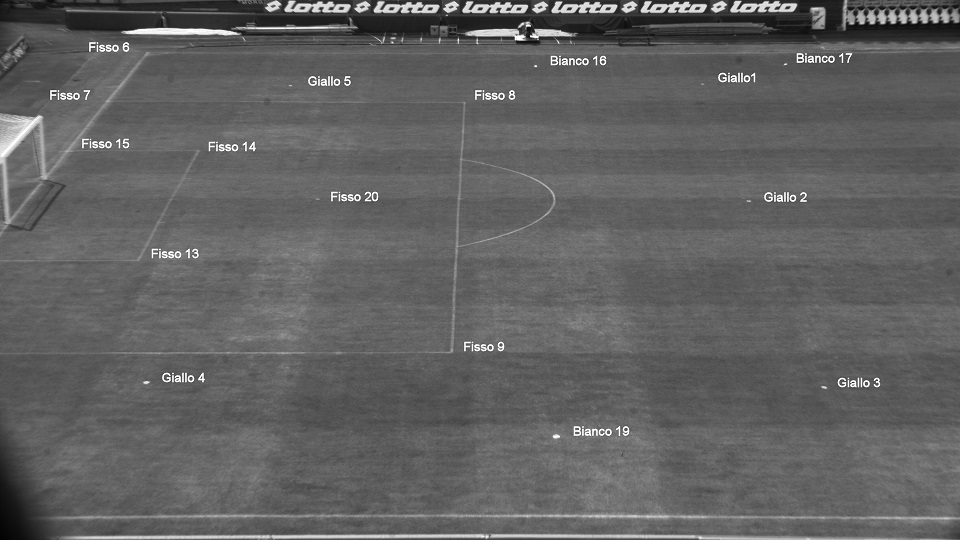
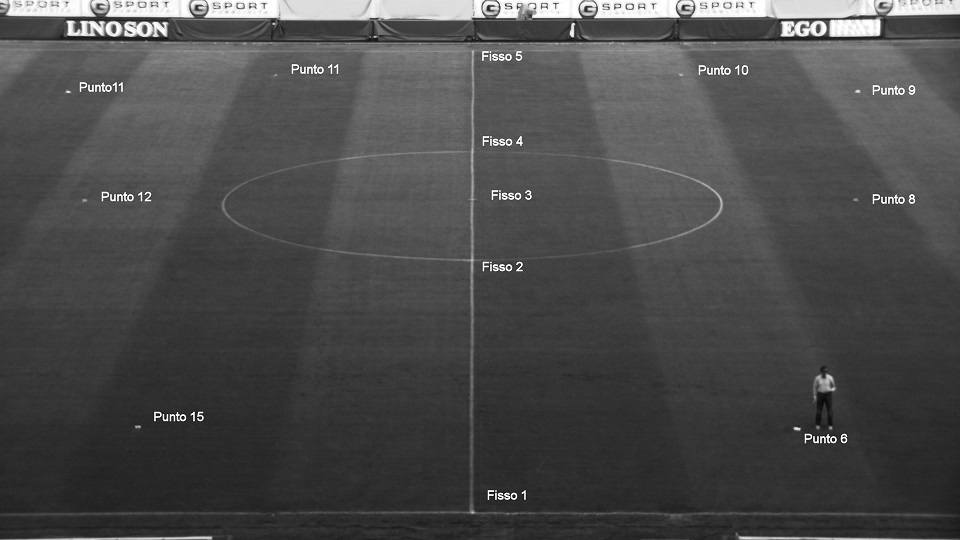
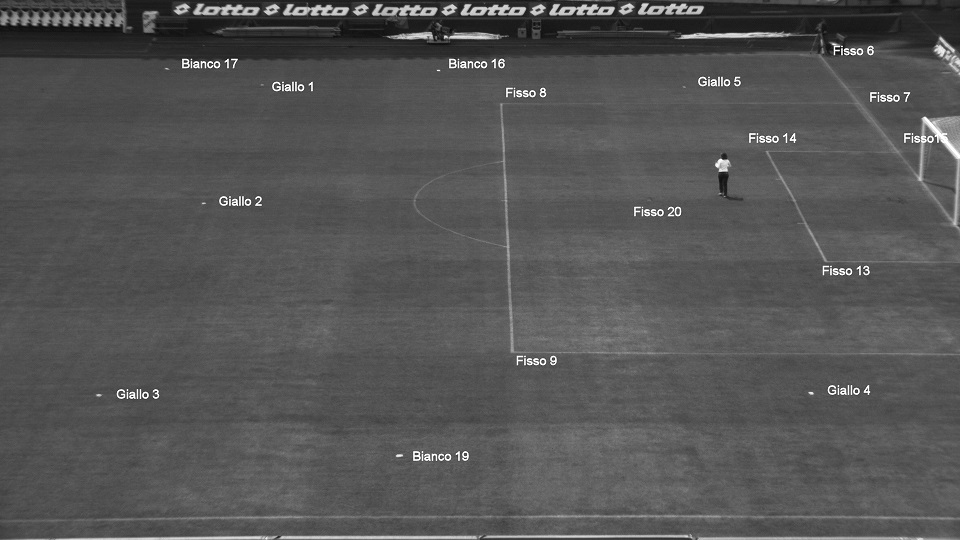
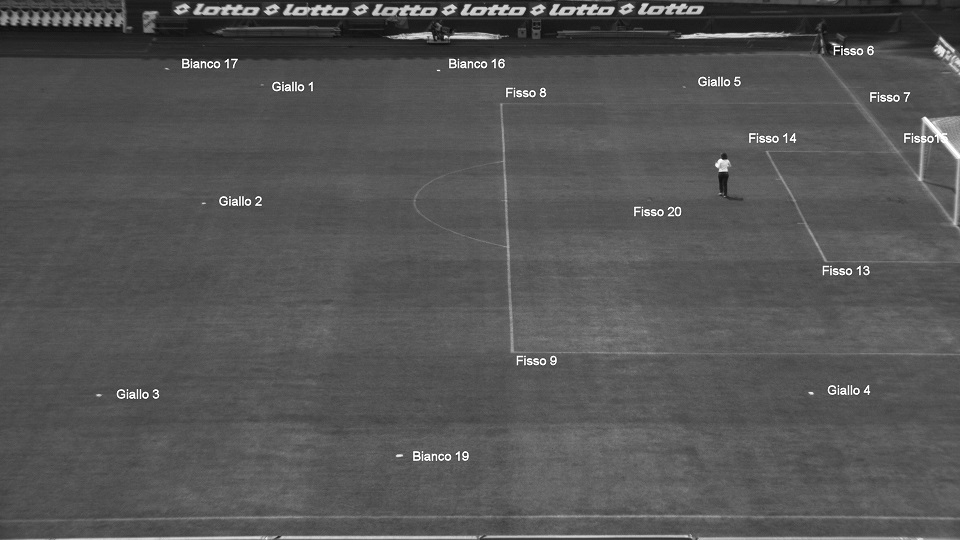
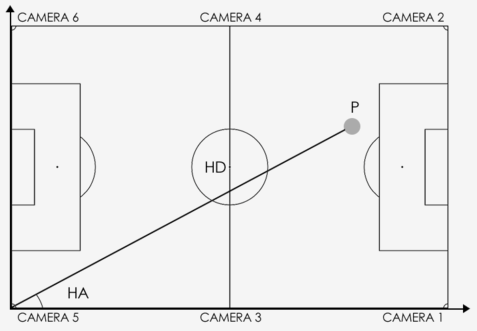
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks

| | 1 | initial version |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
| | 2 | No.2 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: I read a paper http://people.csail.mit.edu/bkph/articles/Tsai_Revisited.pdf Apparently it mentions that the algorithm should work for coplanar points. I shall read through it and hopefully it works. Any suggestions are still very welcome
| | 3 | No.3 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: I read a paper http://people.csail.mit.edu/bkph/articles/Tsai_Revisited.pdf Apparently it mentions that the algorithm should work for coplanar points. I shall read through it and hopefully it works. Any suggestions are still very welcome
| | 4 | No.4 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: I read a paper http://people.csail.mit.edu/bkph/articles/Tsai_Revisited.pdf
Apparently it mentions that the algorithm am getting 90 error and my camera position is wrong. What should work for coplanar points. I shall read through it and hopefully it works. Any suggestions are still very welcome i do
| | 5 | No.5 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: I am getting double cv::calibrateCamera gives me 90 error and my camera positions are wrong.
Position of camera 1 is [87.32213358065832; 31.93220642490884; 13.05887540297087] Camera 1 is not at 30 meters in the y axis !!! It should be negative something y. All my cameras y are 30 something. I have checked the coordinates of the points and the image and confirm they are correct.
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position is wrong. What should = - rot_matrix.transpose() * tvec.
But I am not getting the right camera position ! Help please i dohave been stuck at this problem for 4 months. I just want the camera positions !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
| | 6 | No.6 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: double cv::calibrateCamera gives me 90 error and my camera positions are wrong.
Position of camera 1 is
[87.32213358065832;
31.93220642490884;
13.05887540297087]
Camera 1 is not at 30 meters in the y axis !!! axis. It should be negative something y. All my cameras y are 30 something. I have checked the coordinates of the points and the image and confirm they are correct.
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position = - rot_matrix.transpose() * tvec.
But I am not getting the right camera position ! Help please i have been stuck at this problem for 4 months. I just want the camera positions !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!position
| | 7 | No.7 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: double cv::calibrateCamera gives me 90 error and my camera positions are wrong.
Position of camera 1 is
[87.32213358065832;
31.93220642490884;
13.05887540297087]
Camera 1 is not at 30 meters in the y axis. axis !!!!!!!!!!!!! It should be negative something y. All my cameras y coordinate are 30 something. something. I have checked the coordinates of the points and the image and confirm they are correct.
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position = - rot_matrix.transpose() * tvec.
But I am not getting the right camera positionposition. Can i send the code and data to anyone ? HELP ME FIND THE CAMERA POSITION PLEASE IT HAS BEEN 3 MONTHS AND I AM GOING TO FAIL OH GOD !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
| | 8 | No.8 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: double cv::calibrateCamera gives me 90 error and my camera positions are wrong.
Position of camera 1 is [87.32213358065832; 31.93220642490884; 13.05887540297087] Camera 1 is not at 30 meters in the y axis !!!!!!!!!!!!! It should be negative something y. All my cameras y coordinate are 30 something. I have checked the coordinates of the points and the image and confirm they are correct.
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position = - rot_matrix.transpose() * tvec.
But I am not getting the right camera position. Can i send the code and data to anyone ? HELP ME FIND THE CAMERA POSITION PLEASE IT HAS BEEN 3 MONTHS AND I AM GOING TO FAIL OH GOD !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Camera positions
87.3212582849046; 31.93218648966307; 13.06565020386278]
[88.33600161820506; 36.45175643361132; 13.09339437945696]
[52.67469116679835; 32.05365845570439; 12.67307503062286]
[53.09438819350136; 36.17409639334836; 12.70318338140262]
[9.268389455871184; 35.52733695765274; 14.36430399165124]
[9.21543336317054; 38.71223919680707; 14.1736490348868]
Why do all the Y positions look wrong !!?? Is it a fatal error with opencv 3.0 calibratecamera ???????????????????????
| | 9 | No.9 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: double cv::calibrateCamera gives me 90 error error and my camera positions are wrong.
Position of camera 1 is [87.32213358065832; 31.93220642490884; 13.05887540297087] Camera 1 is not at 30 meters in the y axis !!!!!!!!!!!!! It should be negative something y. All my cameras y coordinate are 30 something. I have checked the coordinates of the points and the image and confirm they are correct.
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position = - rot_matrix.transpose() * tvec.
But I am not getting the right camera position. Can i send the code and data to anyone ? HELP ME FIND THE CAMERA POSITION PLEASE IT HAS BEEN 3 MONTHS AND I AM GOING TO FAIL OH GOD !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Camera positions
87.3212582849046; 31.93218648966307; 13.06565020386278]
[88.33600161820506; 36.45175643361132; 13.09339437945696]
[52.67469116679835; 32.05365845570439; 12.67307503062286]
[53.09438819350136; 36.17409639334836; 12.70318338140262]
[9.268389455871184; 35.52733695765274; 14.36430399165124]
[9.21543336317054; 38.71223919680707; 14.1736490348868]
Why do all the Y positions look wrong !!?? Is it a fatal error with opencv 3.0 calibratecamera ???????????????????????
| | 10 | No.10 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: double cv::calibrateCamera gives me 90 error and my camera positions are wrong.
Position of camera 1 is [87.32213358065832; 31.93220642490884; 13.05887540297087] Camera 1 is not at 30 meters in the y axis !!!!!!!!!!!!! It should be negative something y. All my cameras y coordinate are 30 something. I have checked the coordinates of the points and the image and confirm they are correct.
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position = - rot_matrix.transpose() * tvec.
But I am not getting the right camera position. Can i send the code and data to anyone ? HELP ME FIND THE CAMERA POSITION PLEASE IT HAS BEEN 3 MONTHS AND I AM GOING TO FAIL OH GOD !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Camera positions
87.3212582849046; 31.93218648966307; 13.06565020386278]
[88.33600161820506; 36.45175643361132; 13.09339437945696]
[52.67469116679835; 32.05365845570439; 12.67307503062286]
[53.09438819350136; 36.17409639334836; 12.70318338140262]
[9.268389455871184; 35.52733695765274; 14.36430399165124]
[9.21543336317054; 38.71223919680707; 14.1736490348868]
Why do all the Y positions look wrong !!?? Is it a fatal error with opencv 3.0 calibratecamera ???????????????????????
EDIT: i changed to CV_CALIB_FIX_ASPECT_RATIO and the error has dropped to 19. how do i make it drop to ~1. help
| | 11 | No.11 Revision |
Hi
Given a set of points in world coordinates lying around a field, how do i extract the POSITION in XYZ of the camera ?
Help thanks
EDIT: double cv::calibrateCamera gives me 90 error and my camera positions are wrong.
Position of camera 1 is
[87.32213358065832;
31.93220642490884;
13.05887540297087]
Camera 1 is not at 30 meters in the y axis !!!!!!!!!!!!! It should be negative something y. All my cameras y coordinate are 30 something. I have checked the coordinates of the points and the image and confirm they are correct.13.05887540297087]
I input the into the function following the tutorial http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
calibrateCamera(World_Coords, Image_Coords, Size(1920,1080), cameraMatrix, distCoeffs, rvecs, tvecs, CV_CALIB_FIX_K4 | CV_CALIB_FIX_K5);
The points in world_coords and Image_coords are arranged such that they correspond to each other.
Then i use rodrigues() to extract the 3x3 rot matrix then the camera position = - rot_matrix.transpose() * tvec.
But I am not getting the right camera position. Can i send the code and data to anyone ? HELP ME FIND THE CAMERA POSITION PLEASE IT HAS BEEN 3 MONTHS AND I AM GOING TO FAIL OH GOD !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Camera positions
87.3212582849046; 31.93218648966307; 13.06565020386278]
[88.33600161820506; 36.45175643361132; 13.09339437945696]
[52.67469116679835; 32.05365845570439; 12.67307503062286]
[53.09438819350136; 36.17409639334836; 12.70318338140262]
[9.268389455871184; 35.52733695765274; 14.36430399165124]
[9.21543336317054;
38.71223919680707;
14.1736490348868]
Why do all the Y positions look wrong !!?? Is it a fatal error with opencv 3.0 calibratecamera ???????????????????????
EDIT: i changed to CV_CALIB_FIX_ASPECT_RATIO and the error has dropped to 19. how do i make it drop to ~1. help