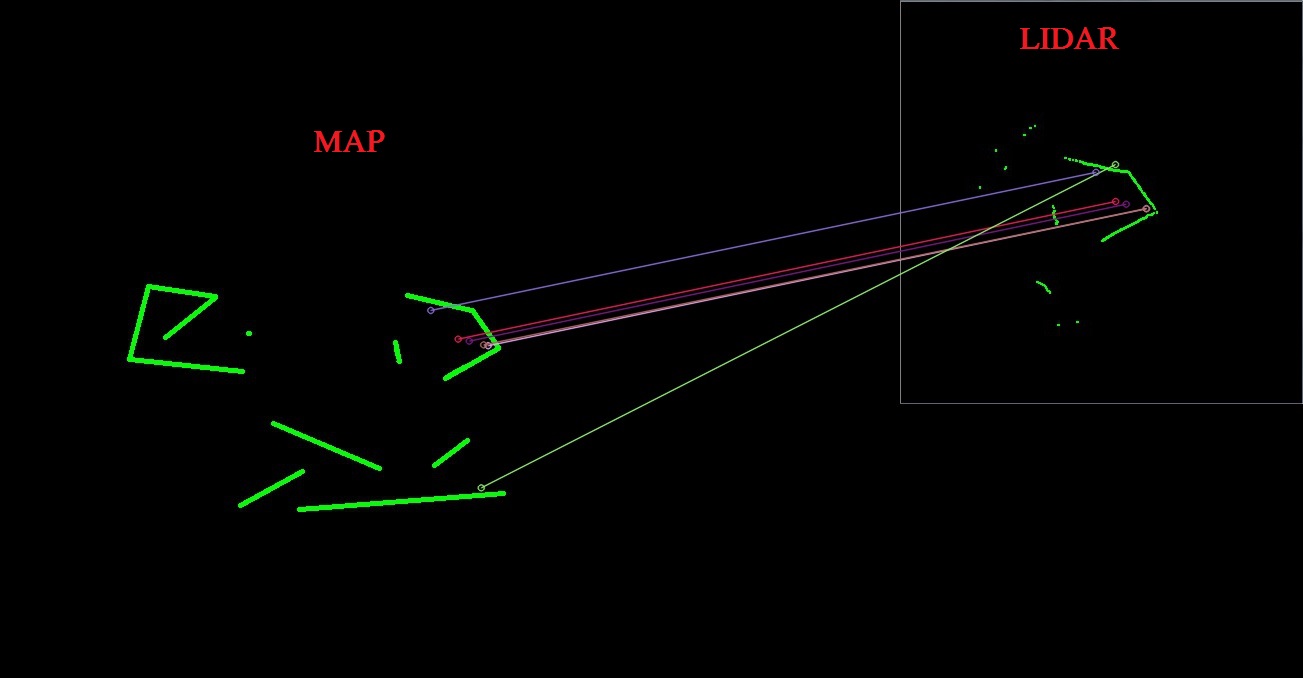
i work on a projects using LIDAR (and lidar only) to provide information about position based on comparison between detected feature and provided map. I already try using ORB, keypoints detection seems nice, but it absolutely bad when comes to feature matching. Is there any alternative method to do this? thanks in advance
 PS : i'm using openCV 3 and C++
PS : i'm using openCV 3 and C++
This forum is disabled, please visit https://forum.opencv.org