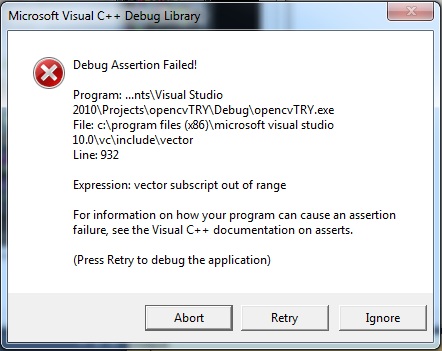
Hi there..Im new to this opencv and really need the explanation how to solve the problem. I try to get a multiple of ROI (array) from a known coordinate but keep on getting this error.
Anyone can figure it out what the problem is and how to solve it?? This is my code:
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp"
using namespace cv;
int main( )
{
Mat img_1 = imread( "Colour2.bmp", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( "Greyscale.bmp", CV_LOAD_IMAGE_GRAYSCALE );
int i;
if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_1;
std::vector<KeyPoint> keypoints_2;
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Draw keypoints
Mat img_keypoints_1,img_keypoints_2;
drawKeypoints( img_1, keypoints_1, img_keypoints_1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
drawKeypoints( img_2, keypoints_2, img_keypoints_2, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
//-- Show detected (drawn) keypoints
imshow("Input", img_keypoints_1 );
imshow("Input2", img_keypoints_2 );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( img_1, keypoints_1, descriptors_object );
extractor.compute( img_2, keypoints_2, descriptors_scene );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
//BFMatcher matcher(NORM_L1);
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
double max_dist = 0; double min_dist = 150; double dist;
//Quick calculation of min and max distances between keypoints
for(int i=0; i<descriptors_object.rows; i++)
{
dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
vector< DMatch > good_matches;
for(int i = 0; i < descriptors_object.rows; i++)
{
if( matches[i].distance < 3*min_dist)
good_matches.push_back( matches[i] );
}
Point c1, c2;
std::vector<cv::Mat> ROI;
Mat img_3 = cv::Mat::zeros(img_2.rows, img_2.cols, CV_8UC1);
for( unsigned int i = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
c1.x = keypoints_1[ good_matches[i].queryIdx ].pt.x;
c1.y = keypoints_1[ good_matches[i].queryIdx ].pt.y;
c2.x= keypoints_2[ good_matches[i].trainIdx ].pt.x;
c2.y= keypoints_2[ good_matches[i].trainIdx ].pt.y;
//Check the coordinate of good matches
printf( "-- Good Match [%d] Keypoint 1.x: %d -- Keypoint 1.y: %d \n", i, c1.x, c1.y );
/* This is where the problems begin
//Get@Crop ROI for each good matches on keypoints_1 with area 20x20
ROI[i] = img_1( cv::Rect(c1.x, c1.y, 20, 20));
//Paste the previous ROI on another image with the same coordinate in img_2
ROI[i].copyTo(img_3( cv::Rect(c2.x, c2.y, 20, 20)));
*/
}
//show final image
imshow("Final ",img_3);
waitKey(0);
return 0;
}