Hello,
I'm working with solvePnp with some bad results for a planar marker.
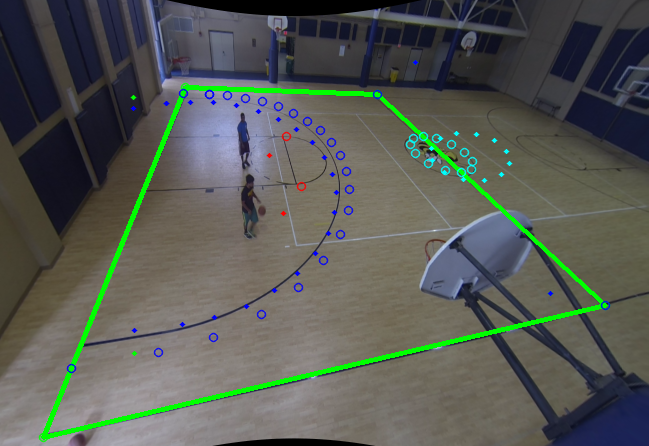
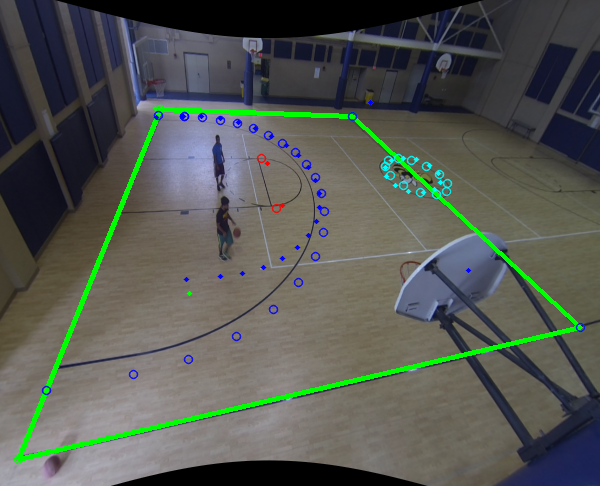
We have 3d Object points and 2d image points. The image is undistorted when when 2d points are detected so distCoeffs can be cv::Mat() from here on out. (i.e. no distortion)
The 2d points are for a marker that is of known size is 14m by 15m. The chessboard square size was also in meters (0.025m square size).
//Make sure 64bit
rvec = cv::Mat(3, 1, CV_64F);
tvec = cv::Mat(3, 1, CV_64F);
bool flag = cv::solvePnP(allImagePoints3d, allImagePoints, camMatrix64, cv::Mat(), rvec, tvec);
std::vector<cv::Point2d> projectedPoints;
cv::Mat J;
cv::projectPoints(allImagePoints3d, rvec, tvec, camMatrix64, cv::Mat(), projectedPoints, J);
cv::Mat Sigma = cv::Mat(J.t() * J, cv::Rect(0,0,6,6)).inv();
// Compute standard deviation
cv::Mat std_dev;
sqrt(Sigma.diag(), std_dev);
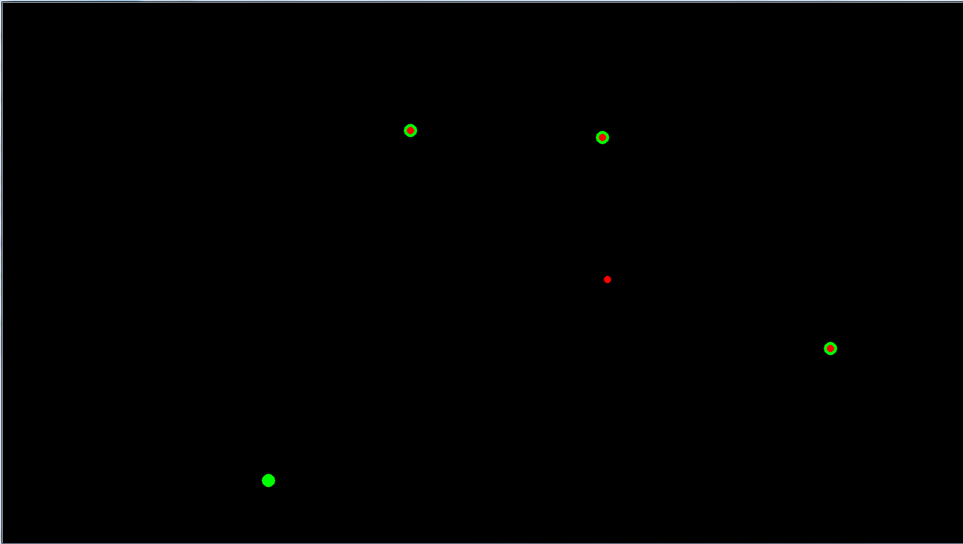
std::cout << "rvec1, tvec1 standard deviation:" << std::endl << std_dev << std::endl;I then draw these projected points in red and original points in green.
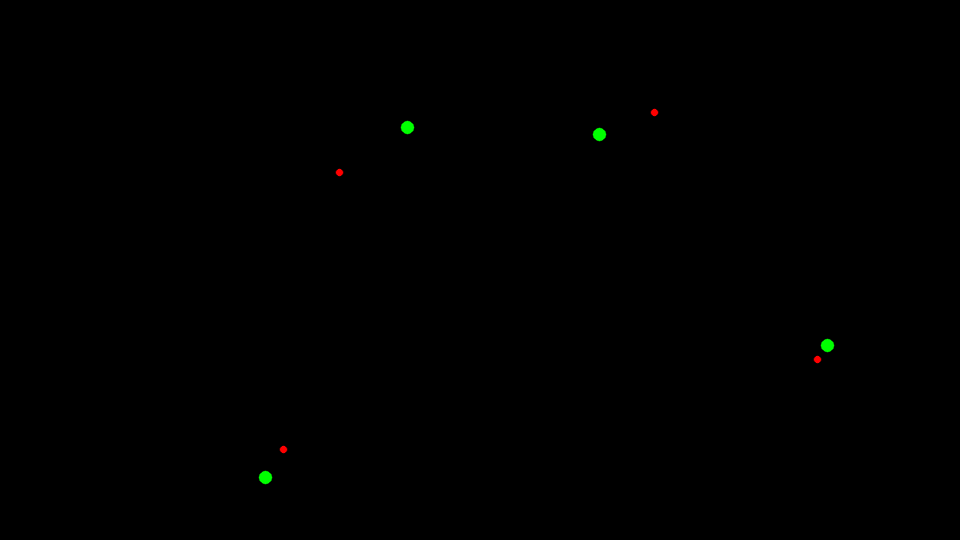
Any ideas? Other posts have suggested that rvec and tvec should be 64bit.