I have a ultra wide angle stereo camera set up and trying stereo calibration with fisheye model in 2.4.11. However, fisheye stereo calibration doesn't get a roi parameter?
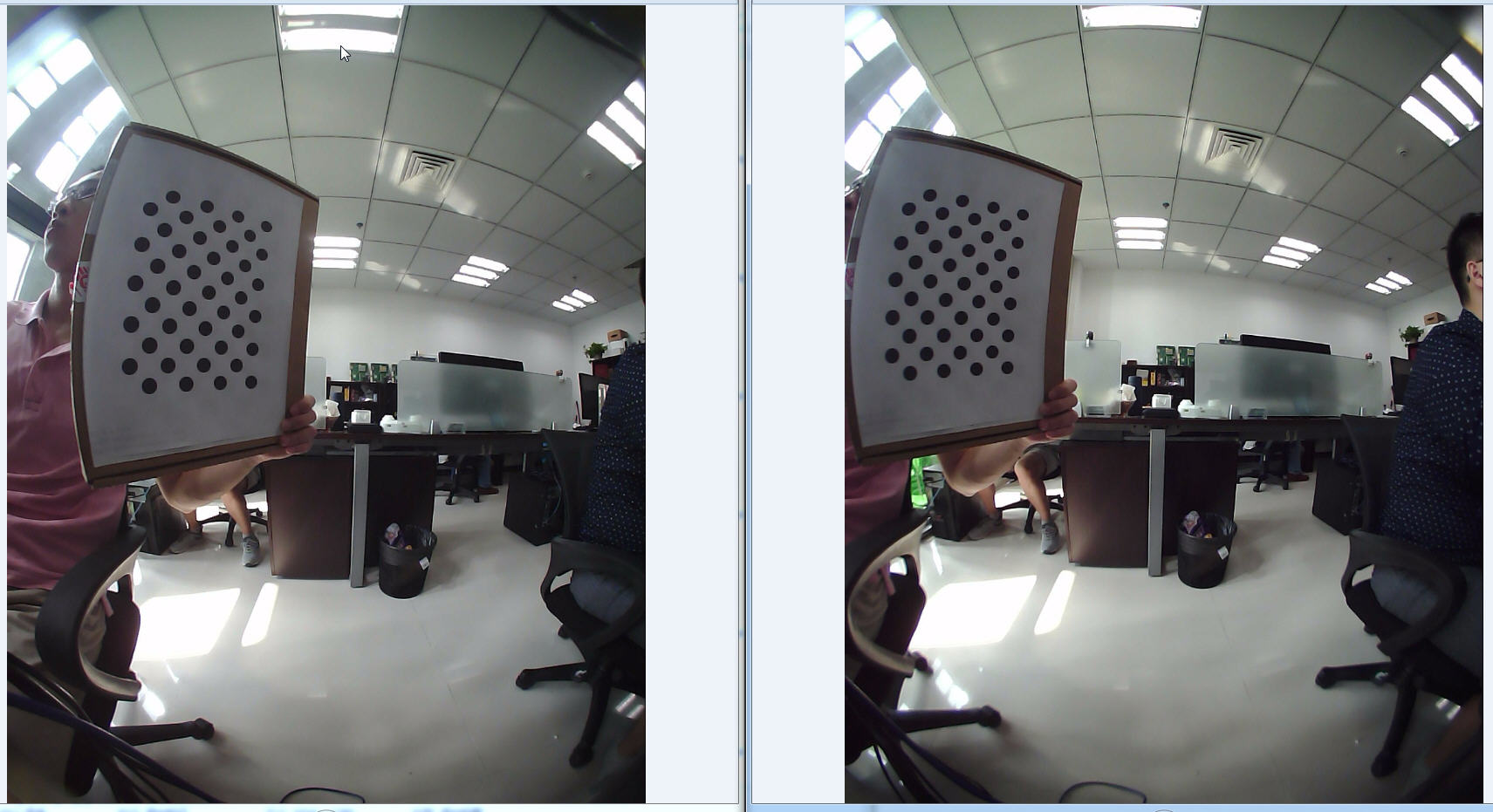
I use input images like:
I calibrate each camera with cv::fisheye::calibrate(objectPoints, imagePoints[0], imageSize, cameraMatrix[0],
distCoeffs[0], rvecs, tvecs, fisheye::CALIB_RECOMPUTE_EXTRINSIC + fisheye::CALIB_CHECK_COND + fisheye::CALIB_FIX_SKEW ,TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5));
which produce:

then I stereo calibrate with double rms = cv::fisheye::stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1],
cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T,
fisheye::CALIB_FIX_INTRINSIC + fisheye::CALIB_USE_INTRINSIC_GUESS + fisheye::CALIB_CHECK_COND + fisheye::CALIB_FIX_SKEW ,
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS,200, 1e-5));
and then rectify images looks like: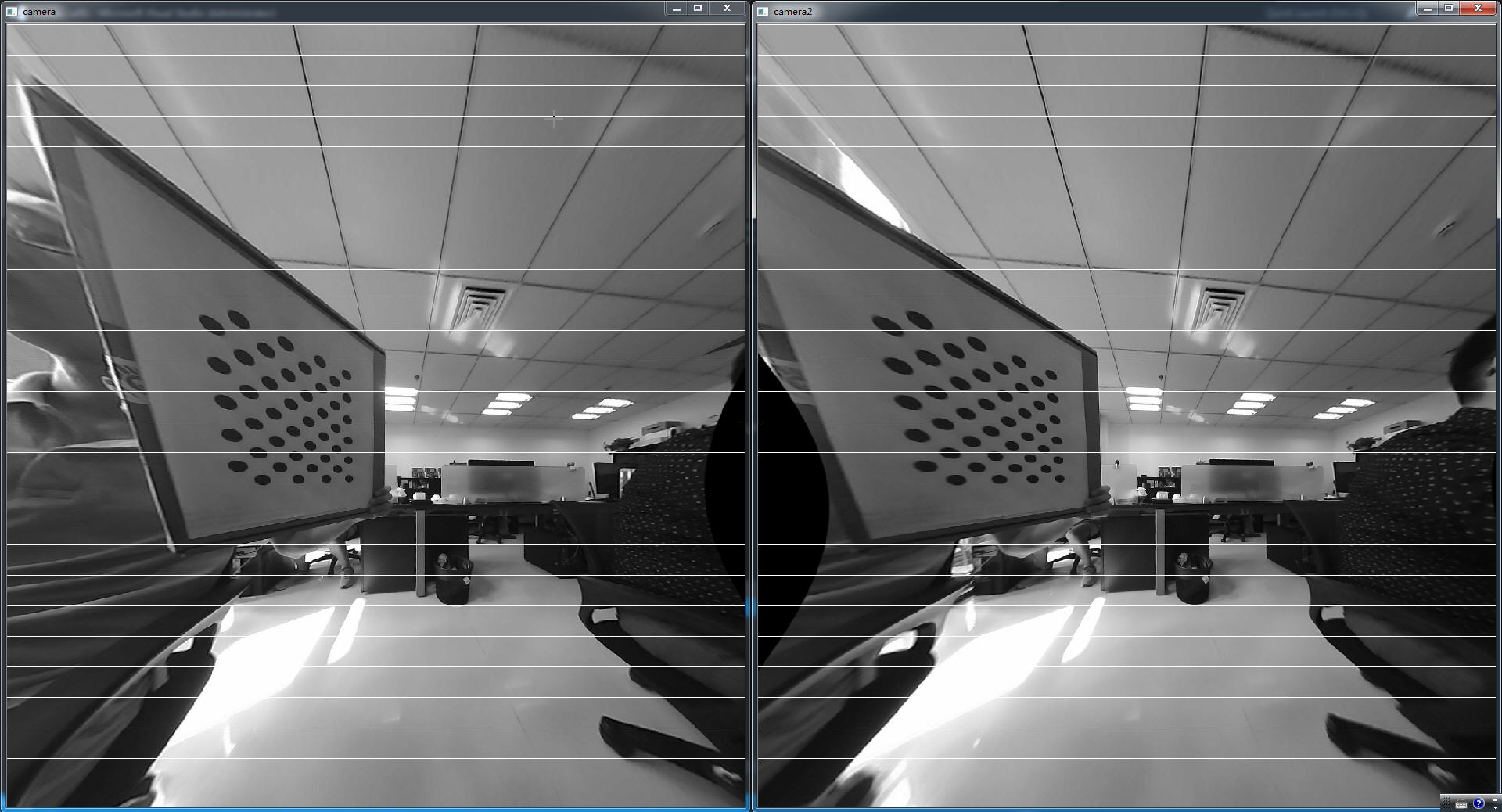
obviously that there is blank region in the rectified images and FOV is bigger then the single calibrated. So, how should I get the roi of the fisheye stereo calibration?