I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. Any help please?
This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. Any help please?
| | 2 | No.2 Revision |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. I didn't really get what the difference Euler angles and the other type of angles? Any help please?
| | 3 | No.3 Revision |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. I didn't really get what the difference Euler angles and the other type of angles? Any help please?
EDITED:
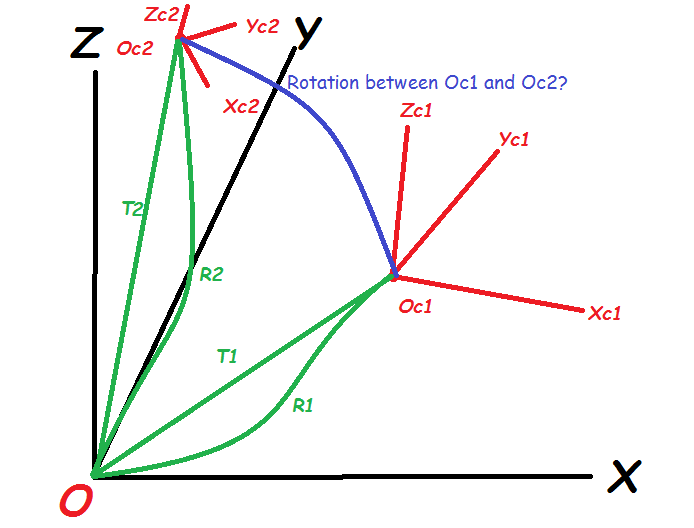
I have Oc1 and Oc2 known points in the space and I know that using R1&T1 I can get to Oc1 and using R2&T2 I can get to Oc2 so I need to compute the 3D rotation matrix between these 2 axis.
| | 4 | No.4 Revision |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. I didn't really get what the difference Euler angles and the other type of angles? Any help please?
EDITED:
I have Oc1 and Oc2 known points in the space and I know that using R1&T1 I can get to Oc1 and using R2&T2 I can get to Oc2 so I need to compute the 3D rotation matrix between these 2 axis.axis. Is there any openCV method that computes such rotation?
| | 5 | No.5 Revision |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. I didn't really get what the difference Euler angles and the other type of angles? Any help please?
EDITED:
I have Oc1 and Oc2 known points in the space and I know that using R1&T1 I can get to Oc1 and using R2&T2 I can get to Oc2 so but I need to compute the 3D rotation matrix between these 2 axis. Oc1 and Oc2. Is there any openCV method that computes such rotation?
| | 6 | No.6 Revision |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. I didn't really get what the difference Euler angles and the other type of angles? Any help please?
EDITED:
I have Oc1 and Oc2 known points in the space and I know that using R1&T1 I can get to Oc1 and using R2&T2 I can get to Oc2 but I need to compute the 3D rotation matrix between Oc1 and Oc2. Is there any openCV method that computes such rotation?
EDITED
Here my code for a sample to test c1Mc2 = (oMc1)^-1 oMc2:
vector <Point3f> listOfPointsOnTable;
cout << "******** DATA *******" << endl;
listOfPointsOnTable.push_back(Point3f(0,0,0));
listOfPointsOnTable.push_back(Point3f(100,0,0));
listOfPointsOnTable.push_back(Point3f(100,100,0));
listOfPointsOnTable.push_back(Point3f(0,100,0));
cout << endl << "Scene points :" << endl;
for (int i = 0; i < listOfPointsOnTable.size(); i++)
{
cout << listOfPointsOnTable[i] << endl;
}
//Define the optical center of each camera
Point3f centreOfC1 = Point3f(23,0,50);
Point3f centreOfC2 = Point3f(0,42,20);
cout << endl << "Center Of C1: " << centreOfC1 << " , Center of C2 : " << centreOfC2 << endl;
//Define the translation and rotation between main axis and the camera 1 axis
Mat translationOfC1 = (Mat_<double>(3, 1) << (0-centreOfC1.x), (0-centreOfC1.y), (0-centreOfC1.z));
float rotxC1 = 0, rotyC1 = 0, rotzC1 = -45;
int focaleC1 = 2;
Mat rotationOfC1 = rotation3D(rotxC1, rotyC1,rotzC1);
cout << endl << "Translation from default axis to C1: " << translationOfC1 << endl;
cout << "Rotation from default axis to C1: " << rotationOfC1 << endl;
Mat transformationToC1 = buildTransformationMatrix(rotationOfC1, translationOfC1);
cout << "Transformation from default axis to C1: " << transformationToC1 << endl << endl;
//Define the translation and rotation between main axis and the camera 2 axis
Mat translationOfC2 = (Mat_<double>(3, 1) << (0-centreOfC2.x), (0-centreOfC2.y), (0-centreOfC2.z));
float rotxC2 = 0, rotyC2 = 0, rotzC2 = -90;
int focaleC2 = 2;
Mat rotationOfC2 = rotation3D(rotxC2, rotyC2,rotzC2);
cout << endl << "Translation from default axis to C2: " << translationOfC2 << endl;
cout << "Rotation from default axis to C2: " << rotationOfC2 << endl;
Mat transformationToC2 = buildTransformationMatrix(rotationOfC2, translationOfC2);
cout << "Transformation from default axis to C2: " << transformationToC2 << endl << endl;
Mat centreOfC2InMat = (Mat_<double>(3, 1) << centreOfC2.x, centreOfC2.y, centreOfC2.z);
Mat centreOfC2InCamera1 = rotationOfC1 * centreOfC2InMat + translationOfC1;
Mat translationBetweenC1AndC2 = -centreOfC2InCamera1;
cout << endl << "****Translation from C2 to C1" << endl;
cout << translationBetweenC1AndC2 << endl;
Mat centreOfC1InMat = (Mat_<double>(3, 1) << centreOfC1.x, centreOfC1.y, centreOfC1.z);
Mat centreOfC1InCamera2 = rotationOfC2 * centreOfC1InMat + translationOfC2;
Mat translationBetweenC2AndC1 = -centreOfC1InCamera2;
cout << "****Translation from C1 to C2" << endl;
cout << translationBetweenC2AndC1 << endl;
cout << "Tran1-1 * Trans2 = " << transformationToC1.inv() * transformationToC2 << endl;
cout << "Tran2-1 * Trans1 = " << transformationToC2.inv() * transformationToC1 << endl;
Mat rotation3D(int alpha, int beta, int gamma)
{
// Rotation matrices around the X, Y, and Z axis
double alphaInRadian = alpha * M_PI / 180.0;
double betaInRadian = beta * M_PI / 180.0;
double gammaInRadian = gamma * M_PI / 180.0;
Mat RX = (Mat_<double>(3, 3) <<
1, 0, 0,
0, cosf(alphaInRadian), sinf(alphaInRadian),
0, -sinf(alphaInRadian), cosf(alphaInRadian));
Mat RY = (Mat_<double>(3, 3) <<
cosf(betaInRadian), 0, sinf(betaInRadian),
0, 1, 0,
-sinf(betaInRadian), 0, cosf(betaInRadian));
Mat RZ = (Mat_<double>(3, 3) <<
cosf(gammaInRadian), sinf(gammaInRadian), 0,
-sinf(gammaInRadian),cosf(gammaInRadian), 0,
0, 0, 1);
// Composed rotation matrix with (RX, RY, RZ)
Mat R = RX * RY * RZ;
return R;
}
Mat buildTransformationMatrix(Mat rotation, Mat translation)
{
Mat transformation = (Mat_<double>(4, 4) <<
rotation.at<double>(0,0), rotation.at<double>(0,1), rotation.at<double>(0,2), translation.at<double>(0,0),
rotation.at<double>(1,0), rotation.at<double>(1,1), rotation.at<double>(1,2), translation.at<double>(1,0),
rotation.at<double>(2,0), rotation.at<double>(2,1), rotation.at<double>(2,2), translation.at<double>(2,0),
0, 0, 0, 1);
return transformation;
}here is the output:
//Origin of 3 axis
O(0,0,0), OC1 (23, 0, 50), OC2 (0, 42, 20)
Translation from default axis to OC1: [-23;
0;
-50]
Rotation from default axis to OC1: [0.7071067690849304, -0.7071067690849304, 0;
0.7071067690849304, 0.7071067690849304, 0;
0, 0, 1]
Trans1 = Transformation from default axis to OC1: [0.7071067690849304, -0.7071067690849304, 0, -23;
0.7071067690849304, 0.7071067690849304, 0, 0;
0, 0, 1, -50;
0, 0, 0, 1]
Translation from default axis to OC2: [0;
-42;
-20]
Rotation from default axis to OC2: [-4.371138828673793e-08, -1, 0;
1, -4.371138828673793e-08, 0;
0, 0, 1]
Trans2 = Transformation from default axis to OC2: [-4.371138828673793e-08, -1, 0, 0;
1, -4.371138828673793e-08, 0, -42;
0, 0, 1, -20;
0, 0, 0, 1]
(Trans1)-1 * (Trans2) = [0.7071067623795453, -0.7071068241967844, 0, -13.43502907247513;
0.7071068241967844, 0.7071067623795453, 0, -45.96194156373071;
0, 0, 1, 30;
0, 0, 0, 1]
(Trans2)-1 * (Trans1) = [0.7071067381763105, 0.7071067999935476, 0, 42.00000100536185;
-0.7071067999935475, 0.7071067381763104, -0, 22.99999816412165;
0, 0, 1, -30;
0, 0, 0, 1]
//Calculation of translation between OC1 and OC2:
****Translation from C2 to C1
[52.69848430156708;
-29.69848430156708;
30]
****Translation from C1 to C2
[1.005361930594972e-06;
19;
-30]As you can see above, the point 4th column of (Trans1)-1 * (Trans2) is not equal neither to the translation from C2->C1 nor translation from C2->C1
it lets me think that c1Mc2 = (oMc1)^-1 oMc2 does not get what I want
| | 7 | No.7 Revision |
I have 2 known 3d points which are the origin of 2 axis plot in the space and I need to compute the 3D rotation matrix between them. I didn't really get what the difference Euler angles and the other type of angles? Any help please?
EDITED:
I have Oc1 and Oc2 known points in the space and I know that using R1&T1 I can get to Oc1 and using R2&T2 I can get to Oc2 but I need to compute the 3D rotation matrix between Oc1 and Oc2. Is there any openCV method that computes such rotation?
EDITED
Here my code for a sample to test c1Mc2 = (oMc1)^-1 oMc2:
vector <Point3f> listOfPointsOnTable;
cout << "******** DATA *******" << endl;
listOfPointsOnTable.push_back(Point3f(0,0,0));
listOfPointsOnTable.push_back(Point3f(100,0,0));
listOfPointsOnTable.push_back(Point3f(100,100,0));
listOfPointsOnTable.push_back(Point3f(0,100,0));
cout << endl << "Scene points :" << endl;
for (int i = 0; i < listOfPointsOnTable.size(); i++)
{
cout << listOfPointsOnTable[i] << endl;
}
//Define the optical center of each camera
Point3f centreOfC1 = Point3f(23,0,50);
Point3f centreOfC2 = Point3f(0,42,20);
cout << endl << "Center Of C1: " << centreOfC1 << " , Center of C2 : " << centreOfC2 << endl;
//Define the translation and rotation between main axis and the camera 1 axis
Mat translationOfC1 = (Mat_<double>(3, 1) << (0-centreOfC1.x), (0-centreOfC1.y), (0-centreOfC1.z));
float rotxC1 = 0, rotyC1 = 0, rotzC1 = -45;
int focaleC1 = 2;
Mat rotationOfC1 = rotation3D(rotxC1, rotyC1,rotzC1);
cout << endl << "Translation from default axis to C1: " << translationOfC1 << endl;
cout << "Rotation from default axis to C1: " << rotationOfC1 << endl;
Mat transformationToC1 = buildTransformationMatrix(rotationOfC1, translationOfC1);
cout << "Transformation from default axis to C1: " << transformationToC1 << endl << endl;
//Define the translation and rotation between main axis and the camera 2 axis
Mat translationOfC2 = (Mat_<double>(3, 1) << (0-centreOfC2.x), (0-centreOfC2.y), (0-centreOfC2.z));
float rotxC2 = 0, rotyC2 = 0, rotzC2 = -90;
int focaleC2 = 2;
Mat rotationOfC2 = rotation3D(rotxC2, rotyC2,rotzC2);
cout << endl << "Translation from default axis to C2: " << translationOfC2 << endl;
cout << "Rotation from default axis to C2: " << rotationOfC2 << endl;
Mat transformationToC2 = buildTransformationMatrix(rotationOfC2, translationOfC2);
cout << "Transformation from default axis to C2: " << transformationToC2 << endl << endl;
Mat centreOfC2InMat = (Mat_<double>(3, 1) << centreOfC2.x, centreOfC2.y, centreOfC2.z);
Mat centreOfC2InCamera1 = rotationOfC1 * centreOfC2InMat + translationOfC1;
Mat translationBetweenC1AndC2 = -centreOfC2InCamera1;
cout << endl << "****Translation from C2 to C1" << endl;
cout << translationBetweenC1AndC2 << endl;
Mat centreOfC1InMat = (Mat_<double>(3, 1) << centreOfC1.x, centreOfC1.y, centreOfC1.z);
Mat centreOfC1InCamera2 = rotationOfC2 * centreOfC1InMat + translationOfC2;
Mat translationBetweenC2AndC1 = -centreOfC1InCamera2;
cout << "****Translation from C1 to C2" << endl;
cout << translationBetweenC2AndC1 << endl;
cout << "Tran1-1 * Trans2 = " << transformationToC1.inv() * transformationToC2 << endl;
cout << "Tran2-1 * Trans1 = " << transformationToC2.inv() * transformationToC1 << endl;
Mat rotation3D(int alpha, int beta, int gamma)
{
// Rotation matrices around the X, Y, and Z axis
double alphaInRadian = alpha * M_PI / 180.0;
double betaInRadian = beta * M_PI / 180.0;
double gammaInRadian = gamma * M_PI / 180.0;
Mat RX = (Mat_<double>(3, 3) <<
1, 0, 0,
0, cosf(alphaInRadian), sinf(alphaInRadian),
0, -sinf(alphaInRadian), cosf(alphaInRadian));
Mat RY = (Mat_<double>(3, 3) <<
cosf(betaInRadian), 0, sinf(betaInRadian),
0, 1, 0,
-sinf(betaInRadian), 0, cosf(betaInRadian));
Mat RZ = (Mat_<double>(3, 3) <<
cosf(gammaInRadian), sinf(gammaInRadian), 0,
-sinf(gammaInRadian),cosf(gammaInRadian), 0,
0, 0, 1);
// Composed rotation matrix with (RX, RY, RZ)
Mat R = RX * RY * RZ;
return R;
}
Mat buildTransformationMatrix(Mat rotation, Mat translation)
{
Mat transformation = (Mat_<double>(4, 4) <<
rotation.at<double>(0,0), rotation.at<double>(0,1), rotation.at<double>(0,2), translation.at<double>(0,0),
rotation.at<double>(1,0), rotation.at<double>(1,1), rotation.at<double>(1,2), translation.at<double>(1,0),
rotation.at<double>(2,0), rotation.at<double>(2,1), rotation.at<double>(2,2), translation.at<double>(2,0),
0, 0, 0, 1);
return transformation;
}here is the output:
//Origin of 3 axis
O(0,0,0), OC1 (23, 0, 50), OC2 (0, 42, 20)
Translation from default axis to OC1: [-23;
0;
-50]
Rotation from default axis to OC1: [0.7071067690849304, -0.7071067690849304, 0;
0.7071067690849304, 0.7071067690849304, 0;
0, 0, 1]
Trans1 = Transformation from default axis to OC1: [0.7071067690849304, -0.7071067690849304, 0, -23;
0.7071067690849304, 0.7071067690849304, 0, 0;
0, 0, 1, -50;
0, 0, 0, 1]
Translation from default axis to OC2: [0;
-42;
-20]
Rotation from default axis to OC2: [-4.371138828673793e-08, -1, 0;
1, -4.371138828673793e-08, 0;
0, 0, 1]
Trans2 = Transformation from default axis to OC2: [-4.371138828673793e-08, -1, 0, 0;
1, -4.371138828673793e-08, 0, -42;
0, 0, 1, -20;
0, 0, 0, 1]
(Trans1)-1 * (Trans2) = [0.7071067623795453, -0.7071068241967844, 0, -13.43502907247513;
0.7071068241967844, 0.7071067623795453, 0, -45.96194156373071;
0, 0, 1, 30;
0, 0, 0, 1]
(Trans2)-1 * (Trans1) = [0.7071067381763105, 0.7071067999935476, 0, 42.00000100536185;
-0.7071067999935475, 0.7071067381763104, -0, 22.99999816412165;
0, 0, 1, -30;
0, 0, 0, 1]
//Calculation of translation between OC1 and OC2:
****Translation from C2 to C1
[52.69848430156708;
-29.69848430156708;
30]
****Translation from C1 to C2
[1.005361930594972e-06;
19;
-30]As you can see above, the point 4th column of (Trans1)-1 * (Trans2) is not equal neither to the translation from C2->C1 nor translation from C2->C1
it lets me think that c1Mc2 = (oMc1)^-1 oMc2 does not get what I want