I'm trying to do panorama stitching. Instead of computing the homography matrix via feature matching, I wan to use known camera rotations (yaw, pitch, roll between photos).
Ive already tried the rotation matrices for R3:
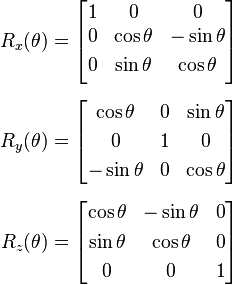
which is somehow not what I'm looking for.
Maybe someone can help me on that.