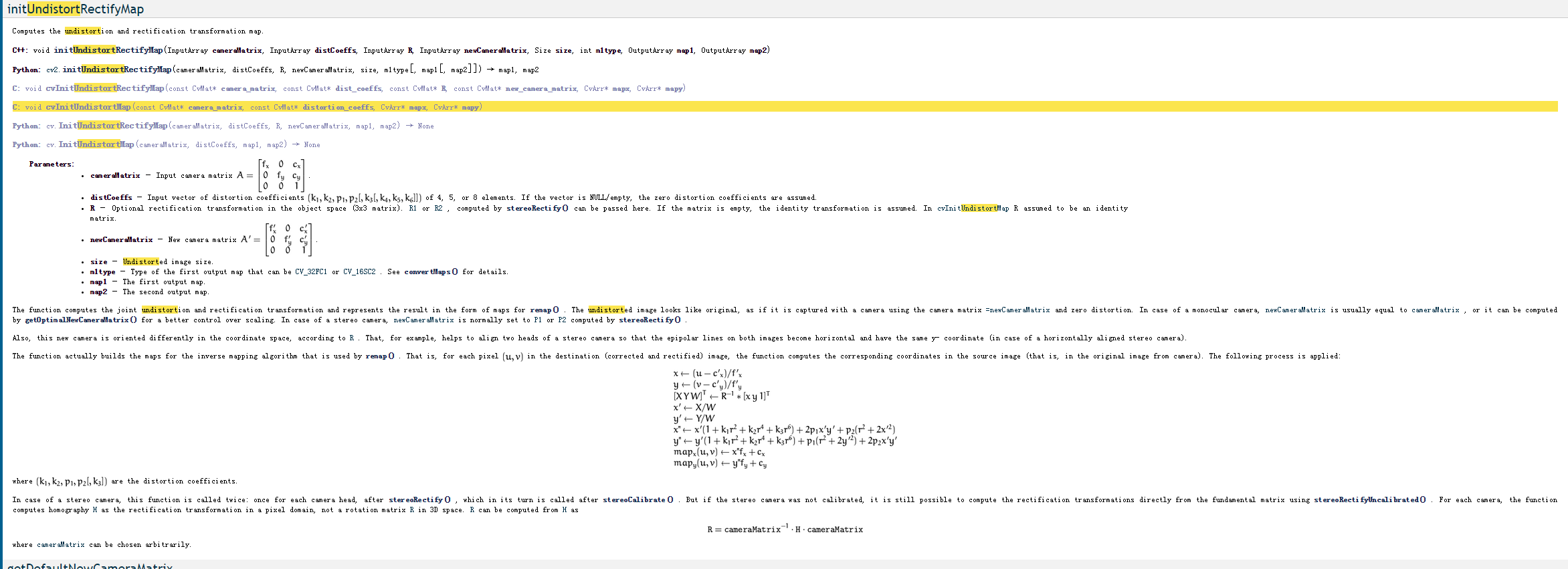
the interpretation of initundistortRectify map in OpenCv tutorial
the sourcecode in undistort.cpp
void cv::initUndistortRectifyMap( InputArray _cameraMatrix, InputArray _distCoeffs,
InputArray _matR, InputArray _newCameraMatrix,
Size size, int m1type, OutputArray _map1, OutputArray _map2 )
{
Mat cameraMatrix = _cameraMatrix.getMat(), distCoeffs = _distCoeffs.getMat();
Mat matR = _matR.getMat(), newCameraMatrix = _newCameraMatrix.getMat();
if( m1type <= 0 )
m1type = CV_16SC2;
CV_Assert( m1type == CV_16SC2 || m1type == CV_32FC1 || m1type == CV_32FC2 );
_map1.create( size, m1type );
Mat map1 = _map1.getMat(), map2;
if( m1type != CV_32FC2 )
{
_map2.create( size, m1type == CV_16SC2 ? CV_16UC1 : CV_32FC1 );
map2 = _map2.getMat();
}
else
_map2.release();
Mat_<double> R = Mat_<double>::eye(3, 3);
Mat_<double> A = Mat_<double>(cameraMatrix), Ar;
if( newCameraMatrix.data )
Ar = Mat_<double>(newCameraMatrix);
else
Ar = getDefaultNewCameraMatrix( A, size, true );
if( matR.data )
R = Mat_<double>(matR);
if( distCoeffs.data )
distCoeffs = Mat_<double>(distCoeffs);
else
{
distCoeffs.create(8, 1, CV_64F);
distCoeffs = 0.;
}
CV_Assert( A.size() == Size(3,3) && A.size() == R.size() );
CV_Assert( Ar.size() == Size(3,3) || Ar.size() == Size(4, 3));
Mat_<double> iR = (Ar.colRange(0,3)*R).inv(DECOMP_LU);
const double* ir = &iR(0,0);
double u0 = A(0, 2), v0 = A(1, 2);
double fx = A(0, 0), fy = A(1, 1);
CV_Assert( distCoeffs.size() == Size(1, 4) || distCoeffs.size() == Size(4, 1) ||
distCoeffs.size() == Size(1, 5) || distCoeffs.size() == Size(5, 1) ||
distCoeffs.size() == Size(1, 8) || distCoeffs.size() == Size(8, 1));
if( distCoeffs.rows != 1 && !distCoeffs.isContinuous() )
distCoeffs = distCoeffs.t();
double k1 = ((double*)distCoeffs.data)[0];
double k2 = ((double*)distCoeffs.data)[1];
double p1 = ((double*)distCoeffs.data)[2];
double p2 = ((double*)distCoeffs.data)[3];
double k3 = distCoeffs.cols + distCoeffs.rows - 1 >= 5 ? ((double*)distCoeffs.data)[4] : 0.;
double k4 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? ((double*)distCoeffs.data)[5] : 0.;
double k5 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? ((double*)distCoeffs.data)[6] : 0.;
double k6 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? ((double*)distCoeffs.data)[7] : 0.;
for( int i = 0; i < size.height; i++ )
{
float* m1f = (float*)(map1.data + map1.step*i);
float* m2f = (float*)(map2.data + map2.step*i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f;
double _x = i*ir[1] + ir[2], _y = i*ir[4] + ir[5], _w = i*ir[7] + ir[8];
for( int j = 0; j < size.width; j++, _x += ir[0], _y += ir[3], _w += ir[6] )
{
double w = 1./_w, x = _x*w, y = _y*w;
double x2 = x*x, y2 = y*y;
double r2 = x2 + y2, _2xy = 2*x*y;
double kr = (1 + ((k3*r2 + k2)*r2 + k1)*r2)/(1 + ((k6*r2 + k5)*r2 + k4)*r2);
double u = fx*(x*kr + p1*_2xy + p2*(r2 + 2*x2)) + u0;
double v = fy*(y*kr + p1*(r2 + 2*y2) + p2*_2xy) + v0;
if( m1type == CV_16SC2 )
{
int iu = saturate_cast<int>(u*INTER_TAB_SIZE);
int iv = saturate_cast<int>(v*INTER_TAB_SIZE);
m1[j*2] = (short)(iu >> INTER_BITS);
m1[j*2+1] = (short)(iv >> INTER_BITS);
m2[j] = (ushort)((iv & (INTER_TAB_SIZE-1))*INTER_TAB_SIZE + (iu & (INTER_TAB_SIZE-1)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
}
else
{
m1f[j*2] = (float)u;
m1f[j*2+1] = (float)v;
}
}
}
}
Something puzzle me between source code and tutorial
1.[u,v] in the tutorial is the point in the undistort image coordinates,but in source code is the point in the distort image. 2.the radial distort happens in converting the world coordinate to the camera coordinate or the camera coordinate to the image coordinate.In the source code [_x,_y,_w] is the world coordinate, which is nomalized into [x,y] as camera coordinate,that is true? 3.The R (rotation matrix) is assumed as identity,why?