Hi everyone,
I am working with the calibration of four cameras of a quadro camera 360 degrees setup, and sometimes when testing I got really strange results. I tried searching online about it, but it yielded me not any clear explanations of possible causes of this problem.
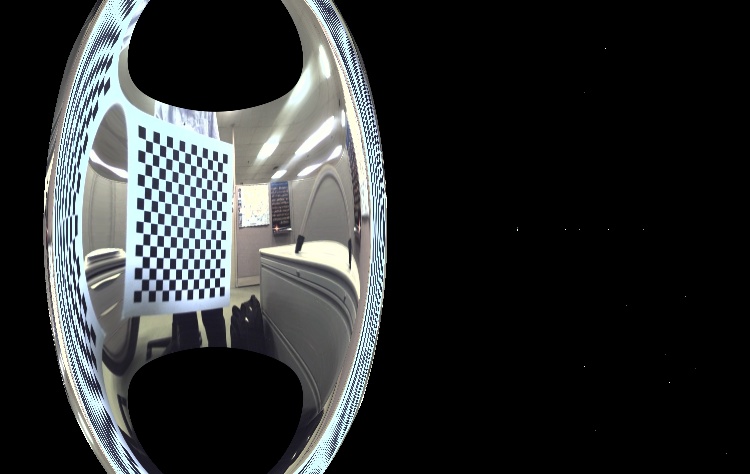
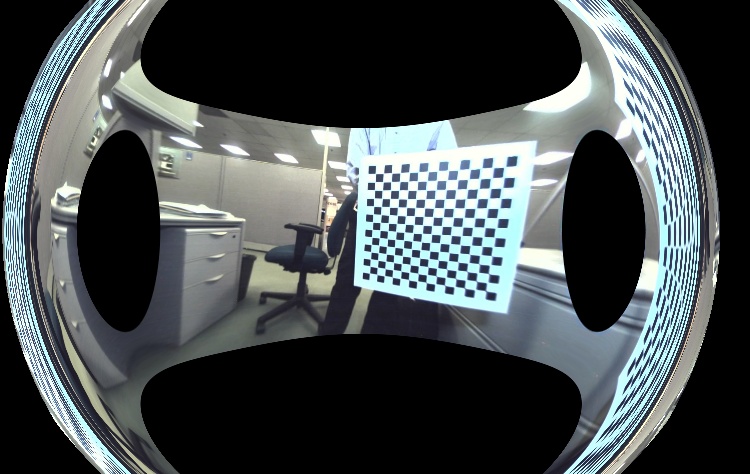
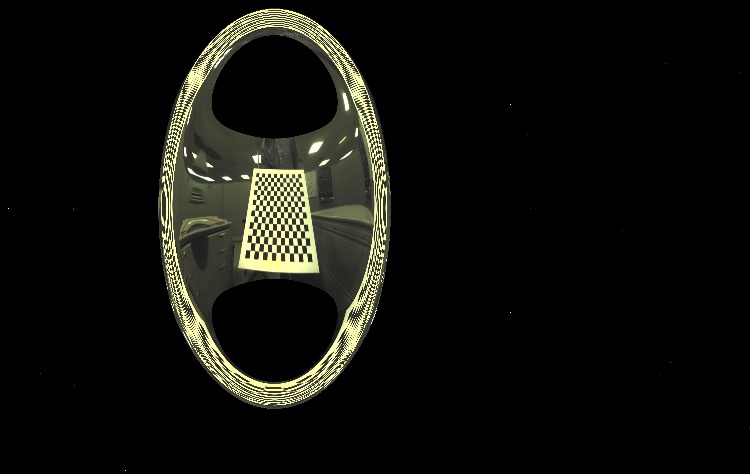
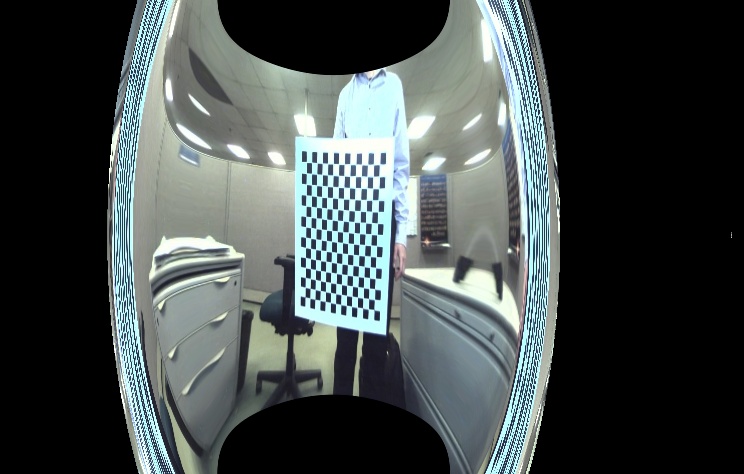
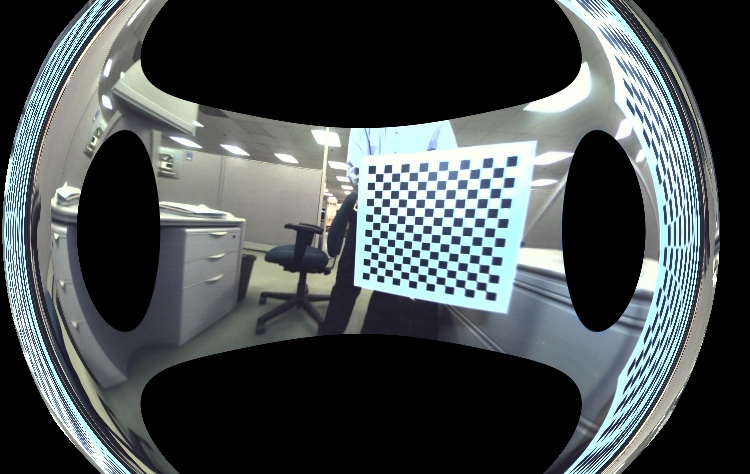
I am attaching some images for you so you can see it, but some of them differ a lot.
What I realized after doing some tests is that if use images which my chessboard placed near the limits of the view, the expected result (nice calibration) will not be achieved. Although when I use a few images and with the board near the center of the view, the calibration algorithm returns to me a better result. I got some nice calibrations using just 5 or 6 images, but since these results are not general (chessboard almost in the center always), it does not undistort all kinds of images that I can take (I can still see the corners a bit circular in some images that I applied the results from the calibration, instead of straight patterns).
Is there anyone who can give me a nice explanation of why this is happening? And more than that, maybe clarify what I should do in order to get a good calibration and not what I got?
Thank you!!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}