Hi I've been trying to segment the image of a lane in which I have after performing different steps reached this result, I require is that the lane leading car or rail which is marked with the dividing lines of being noticed lane, someone who can help then attached the code.
Now I have been working on the analysis of images with OpenCV, what I'm trying to do is recognize the lane dividing lines, what I do is the following:
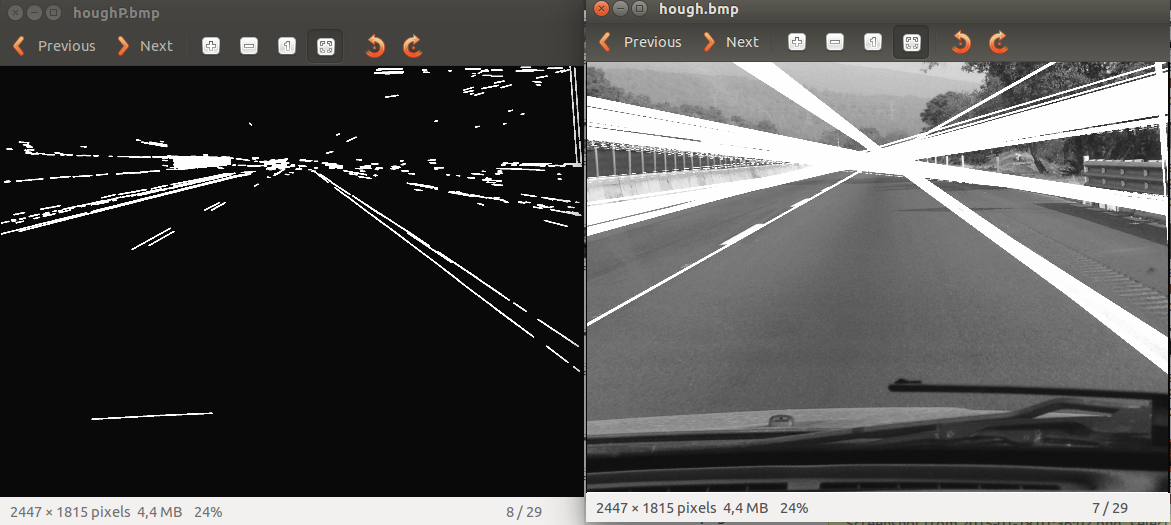
1.I receive a image, 2. Then transform it to grayscale 3.I apply the GaussianBlur 4.After I place me in the ROI 5.I apply the canny 6.then I look for lines with hough transform Lines 7.Draw the lines obtained from hough
#include "opencv2/highgui/highgui.hpp"
#include <opencv2/objdetect/objdetect.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <vector>
#include <stdio.h>
#include "linefinder.h"
#define PI 3.1415926
using namespace cv;
using namespace std;
int main(int argc, char* argv[]) {
int houghVote = 200;
string arg = argv[1];
Mat image;
image = imread(argv[1]);
Mat gray;
cvtColor(image,gray,CV_RGB2GRAY);
GaussianBlur( gray, gray, Size( 5, 5 ), 0, 0 );
vector<string> codes;
Mat corners;
findDataMatrix(gray, codes, corners);
drawDataMatrixCodes(image, codes, corners);
//Mat image = imread("");
//Rect region_of_interest = Rect(x, y, w, h);
//Mat image_roi = image(region_of_interest);
std::cout << image.cols << "\n";
std::cout << image.rows << "\n";
Rect roi(0,200,640,206);
Mat imgROI = image(roi);
// Display the image
imwrite("original.bmp", imgROI);
// Canny algorithm
Mat contours;
Canny(imgROI, contours, 120, 300, 3);
imwrite("canny.bmp", contours);
Mat contoursInv;
threshold(contours,contoursInv,128,255,THRESH_BINARY_INV);
// Display Canny image
imwrite("contours.bmp", contoursInv);
/*
Hough tranform for line detection with feedback
Increase by 25 for the next frame if we found some lines.
This is so we don't miss other lines that may crop up in the next frame
but at the same time we don't want to start the feed back loop from scratch.
*/
std::vector<Vec2f> lines;
if (houghVote < 1 or lines.size() > 2){ // we lost all lines. reset
houghVote = 200;
}/*else{
houghVote += 25;
} */
while(lines.size() < 5 && houghVote > 0){
HoughLines(contours,lines,1,PI/180, houghVote);
houghVote -= 5;
}
std::cout << houghVote << "\n";
Mat result(imgROI.size(),CV_8U,Scalar(255));
imgROI.copyTo(result);
// Draw the limes
std::vector<Vec2f>::const_iterator it= lines.begin();
Mat hough(imgROI.size(),CV_8U,Scalar(0));
while (it!=lines.end()) {
float rho= (*it)[0]; // first element is distance rho
float theta= (*it)[1]; // second element is angle theta
if ( theta > 0.09 && theta < 1.48 || theta < 3.14 && theta > 1.66 ) {
// filter to remove vertical and horizontal lines
// point of intersection of the line with first row
Point pt1(rho/cos(theta),0);
// point of intersection of the line with last row
Point pt2((rho-result.rows*sin(theta))/cos(theta),result.rows);
// draw a white line
line( result, pt1, pt2, Scalar(255), 8);
line( hough, pt1, pt2, Scalar(255), 8);
}
++it;
}
// Display the detected line image
std::cout << "line image:"<< "\n";
namedWindow("Detected Lines with Hough");
imwrite("hough.bmp", result);
// Create LineFinder instance
LineFinder ld;
// Set probabilistic Hough parameters
ld.setLineLengthAndGap(60,10);
ld.setMinVote(4);
// Detect lines
std::vector<Vec4i> li= ld.findLines(contours);
Mat houghP(imgROI.size(),CV_8U,Scalar(0));
ld.setShift(0);
ld.drawDetectedLines(houghP);
std::cout << "First Hough" << "\n";
imwrite("houghP.bmp", houghP);
// bitwise AND of the two hough images
bitwise_and(houghP,hough,houghP);
Mat houghPinv(imgROI.size(),CV_8U,Scalar(0));
Mat dst(imgROI.size(),CV_8U,Scalar(0));
threshold(houghP,houghPinv,150,255,THRESH_BINARY_INV); // threshold and invert to black lines
namedWindow("Detected Lines with Bitwise");
imshow("Detected Lines with Bitwise", houghPinv);
Canny(houghPinv,contours,100,350);
li= ld.findLines(contours);
// Display Canny image
imwrite("contours.bmp", contoursInv);
// Set probabilistic Hough parameters
ld.setLineLengthAndGap(5,2);
ld.setMinVote(1);
ld.setShift(image.cols/3);
ld.drawDetectedLines(image);
std::stringstream stream;
stream << "Lines Segments: " << lines.size();
putText(image, stream.str(), Point(10,image.rows-10), 2, 0.8, Scalar(0,0,255),0);
imwrite("processed.bmp", image);
char key = (char) waitKey(10);
lines.clear();
}
Then I show the original image and the result