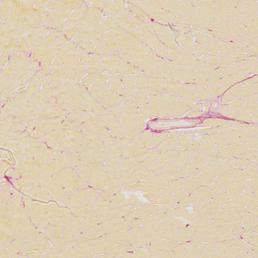
Hi! I'm trying to threshold + mask this image:
However, using the code below this produces erratic and random images:
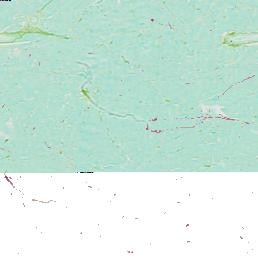
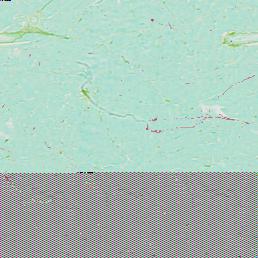
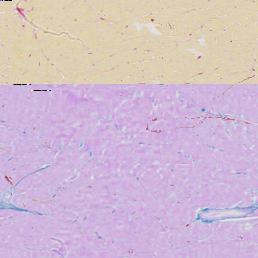
I'm guessing it has something to do with the binary header imprinted in beginning of the produced images, however, I'm not where they are coming from. Also, considering that the images change randomly, the header is to some extent unique for each image.
The input image is all positive thresholds.
Any insights are most welcome!
from PIL import Image, ImageMath
import cv2, numpy, math, os, copy
A=0
B=1
C=2
MIN=0
MAX=1
U=0
L=1
class Thresholder():
"""Class for performing thresholding and/or conversions."""
# _thresholds=[]
# bounds=[[],[]]
# conversion_factor = None
# neg_test = False
# pos_test = False
def __init__(self,thresholds,from_cs="rgb",to_cs="rgb"):
"""Instantiates a new thresholding engine.
Args:
thresholds: 2d array of the form
[ [cs_val_min_a, cs_val_max_a],
[cs_val_min_b, cs_val_max_b],
[cs_val_min_c, cs_val_max_c] ]
...where a,b and c are the channels of
the target (threshold) colorspace.
Negative value in either max or min of a channel
will trigger a NOT threshold (i.e. inverted).
from_colorspace: Originating test set colorspace.
to_colorspace: Colorspace of threshold values.
Returns:
A new Thresholding object.
"""
self._thresholds=thresholds
from_cs=from_cs.upper()
to_cs=to_cs.upper()
self.conversion_factor = self._check_cs_conversion(from_cs,to_cs)
upper=(thresholds[A][MAX],thresholds[B][MAX],thresholds[C][MAX])
lower=(thresholds[A][MIN],thresholds[B][MIN],thresholds[C][MIN])
self.bounds=(upper,lower)
upper = []
lower = []
self.inverts=[]
# TODO(jonas): Optimize iterations
for i in range(3):
u=self.bounds[U][i]
l=self.bounds[L][i]
if l < 0 or u < 0:
l=abs(l)
u=abs(u)
self.inverts.append(True)
else:
self.inverts.append(False)
upper.append(u)
lower.append(l)
upper=numpy.array(upper,dtype=numpy.uint8)
lower=numpy.array(lower,dtype=numpy.uint8)
self.bounds=[upper,lower]
if (True not in self.inverts or False not in self.inverts):
self.pos_test = copy.deepcopy(self.bounds)
self.neg_test = copy.deepcopy(self.bounds)
for i,b in enumerate(self.inverts):
if self.inverts[i] is True:
self.pos_test[U][i]=255
self.pos_test[L][i]=0
else:
self.neg_test[U][i]=255
self.neg_test[L][i]=0
def threshold_image(self,image):
"""Performs thresholding on a whole image.
Args:
image: One of either formats below:
PIL (as RGB)
(numpy array) todo
(cv-image) todo
Returns:
The thresholded image as PIL (RGB) image,
with positive bits set to 255 and false to 0.
"""
image=self.pil_2_cv(image) # Still RGB, not BGR.
if self.conversion_factor is not None:
print "I was never here"
image = cv2.cvtColor(image,self.conversion_factor)
print "Using %s" % self.conversion_factor
if True not in self.inverts: # No inverted tests
mask = cv2.inRange(image, self.bounds[L], self.bounds[U])
elif False not in self.inverts: # All inverted tests
print "I was never here"
negMask=cv2.inRange(image, self.bounds[L], self.bounds[U])
mask = cv2.bitwise_not(negMask)
else: # Mix inverted and non-inverted
print "I was never here"
nots=cv2.inRange(image, self.neg_test[L], self.neg_test[U])
yeses=cv2.inRange(image, self.pos_test[L], self.os_test[U])
nots=cv2.bitwise_not(nots)
mask = cv2.bitwise_and(nots,yeses)
im=cv2.bitwise_and(image,image,mask=mask)
print im.shape
return self.cv_2_pil(im).copy()
def cv_2_pil(self,image):
# Converts cv-image to PIL.
return Image.fromarray(image)
def pil_2_cv(self,image):
# Converts PIL-image to numpy array (for cv). Still RGB.
return numpy.array(image)
def _check_cs_conversion(self,from_cs,to_cs):
"""Checks if conversion between from/to is possible.
Args:
from_cs: originating colorspace abbreviation, capitalized
to_cs: target (threshold) colorspace abbreviation, capitalized
Returns:
cv2 constant identifying conversion, or None if not found.
"""
if "COLOR_%s2%s" % (from_cs,to_cs) in dir(cv2):
return eval("cv2.COLOR_%s2%s" % (from_cs,to_cs))
