Hey there,
I have a very strange problem. I'm using this code to detect an image in another one:
public void startRecognition() {
run++;
System.out.println("RUN NO: " + run);
Mat img_scene = Highgui.imread((String)pics.keySet().toArray()[current_scene]);
Mat img_object = Highgui.imread(pics.get((String)pics.keySet().toArray()[current_scene]).get(current_obj));
try {
FileWriter writer = new FileWriter("D:/opencvws/ImageRecognition/src/main/resources/test.yaml");
writer.write("%YAML:1.0\nhessianThreshold: "+hess_thresh+".\n");
writer.close();
} catch (IOException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
System.out.println(new Date().getTime());
FeatureDetector detector = FeatureDetector.create(FeatureDetector.SURF);
detector.read("D:/opencvws/ImageRecognition/src/main/resources/test.yaml");
MatOfKeyPoint keypoints_object = new MatOfKeyPoint();
MatOfKeyPoint keypoints_scene = new MatOfKeyPoint();
detector.detect(img_object, keypoints_object);
detector.detect(img_scene, keypoints_scene);
System.out.println("OK: " + keypoints_object.total());
System.out.println("SK: " + keypoints_scene.total());
DescriptorExtractor extractor = DescriptorExtractor.create(2); //2 = SURF;
Mat descriptor_object = new Mat();
Mat descriptor_scene = new Mat() ;
extractor.compute(img_object, keypoints_object, descriptor_object);
extractor.compute(img_scene, keypoints_scene, descriptor_scene);
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED); // 1 = FLANNBASED
matcher.clear();
MatOfDMatch matches = new MatOfDMatch();
matcher.match(descriptor_object, descriptor_scene, matches);
List<DMatch> matchesList = matches.toList();
System.out.println(matches.total());
Double max_dist = 0.0;
Double min_dist = 100.0;
for(int i = 0; i < descriptor_object.rows(); i++){
Double dist = (double) matchesList.get(i).distance;
if(dist < min_dist) min_dist = dist;
if(dist > max_dist) max_dist = dist;
}
LinkedList<DMatch> good_matches = new LinkedList<DMatch>();
MatOfDMatch gm = new MatOfDMatch();
for(int i = 0; i < descriptor_object.rows(); i++){
if(matchesList.get(i).distance < 2*min_dist){
good_matches.addLast(matchesList.get(i));
}
}
gm.fromList(good_matches);
Mat img_matches = new Mat();
LinkedList<Point> objList = new LinkedList<Point>();
LinkedList<Point> sceneList = new LinkedList<Point>();
List<KeyPoint> keypoints_objectList = keypoints_object.toList();
List<KeyPoint> keypoints_sceneList = keypoints_scene.toList();
for(int i = 0; i<good_matches.size(); i++){
objList.addLast(keypoints_objectList.get(good_matches.get(i).queryIdx).pt);
sceneList.addLast(keypoints_sceneList.get(good_matches.get(i).trainIdx).pt);
}
MatOfPoint2f obj = new MatOfPoint2f();
obj.fromList(objList);
MatOfPoint2f scene = new MatOfPoint2f();
scene.fromList(sceneList);
Mat hg = Calib3d.findHomography(obj, scene, 8,3);
System.out.println(hg.toString());
Mat obj_corners = new Mat(4,1,CvType.CV_32FC2);
Mat scene_corners = new Mat(4,1,CvType.CV_32FC2);
obj_corners.put(0, 0, new double[] {0,0});
obj_corners.put(1, 0, new double[] {img_object.cols(),0});
obj_corners.put(2, 0, new double[] {img_object.cols(),img_object.rows()});
obj_corners.put(3, 0, new double[] {0,img_object.rows()});
System.out.println(hg.get(0, 0)[0] + ", " + hg.get(1, 0)[0] + ", " +hg.get(2, 0)[0]);
System.out.println(hg.get(0, 1)[0] + ", " + hg.get(1, 1)[0] + ", " +hg.get(2, 1)[0]);
System.out.println(hg.get(0, 2)[0] + ", " + hg.get(1, 2)[0] + ", " +hg.get(2, 2)[0]);
Core.perspectiveTransform(obj_corners,scene_corners, hg);
Point p1 = new Point(scene_corners.get(0,0)[0]+img_object.cols(), scene_corners.get(0,0)[1]);
Point p2 = new Point(scene_corners.get(1,0)[0]+img_object.cols(), scene_corners.get(1,0)[1]);
Point p3 = new Point(scene_corners.get(2,0)[0]+img_object.cols(), scene_corners.get(2,0)[1]);
Point p4 = new Point(scene_corners.get(3,0)[0]+img_object.cols(), scene_corners.get(3,0)[1]);
System.out.println(new Date().getTime());
Features2d.drawMatches(
img_object,
keypoints_object,
img_scene,
keypoints_scene,
gm,
img_matches);
Core.line(img_matches, p1 , p2, new Scalar(0, 255, 0),4);
Core.line(img_matches, p2, p3, new Scalar(0, 255, 0),4);
Core.line(img_matches, p3, p4, new Scalar(0, 255, 0),4);
Core.line(img_matches, p4, p1, new Scalar(0, 255, 0),4);
Mat resizeimage = new Mat();
Size sz = new Size(1200,1000);
Imgproc.resize( img_matches, img_matches, sz );
panel1.setimagewithMat(img_matches);
frame1.repaint();
matcher.clear();
img_matches = new Mat();
img_object = new Mat();
img_scene = new Mat();
keypoints_object = new MatOfKeyPoint();
keypoints_scene = new MatOfKeyPoint();
hg = new Mat();
}
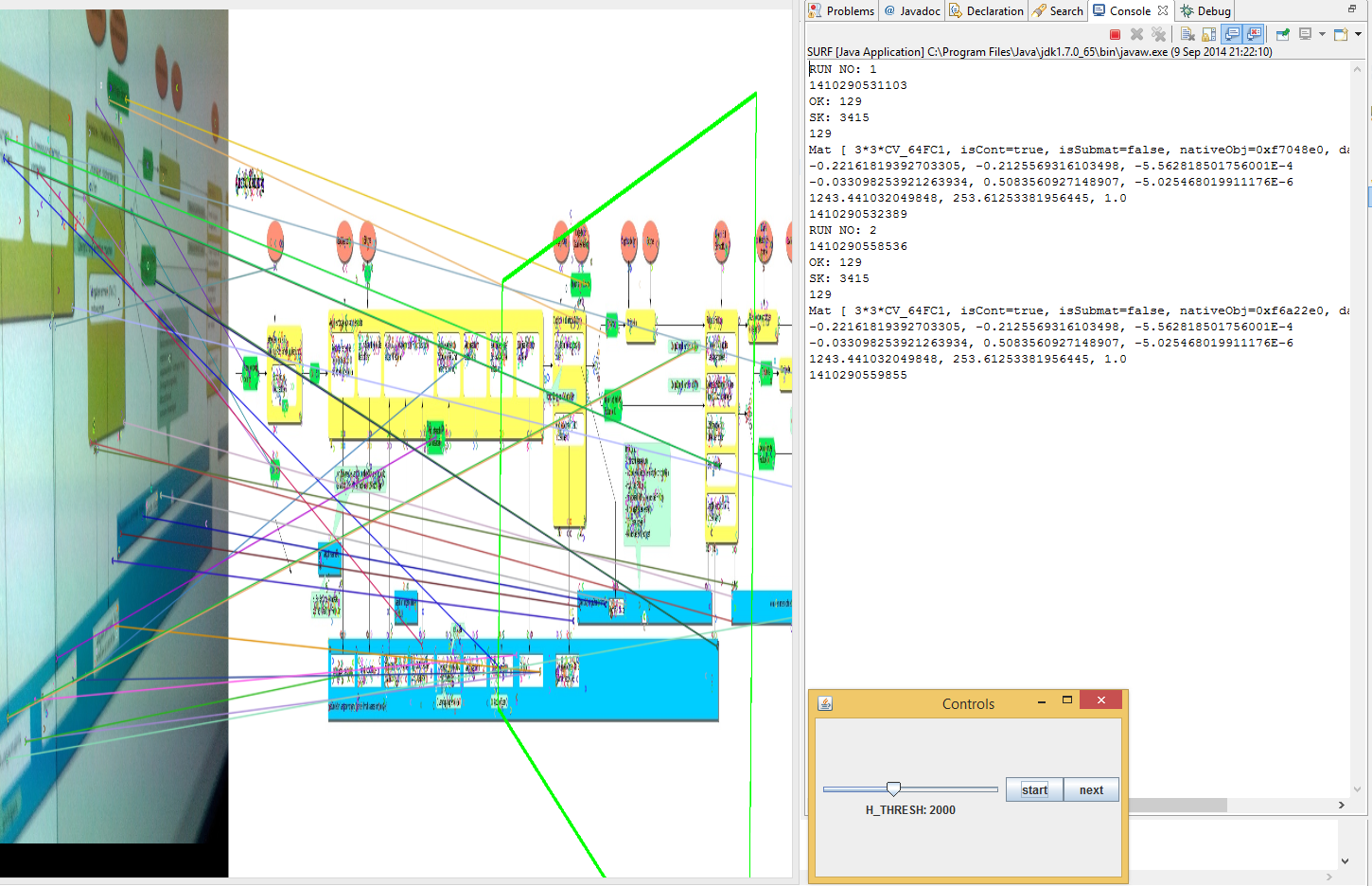
If I run the startRecognition methode twice (the opencv library is loaded at the startup) in my running application i get the same result for both recognitions. For the third try it detects the same keypoints but calculates another transformation matrix (hg). Examples:
after 2nd try:
after 3rd:
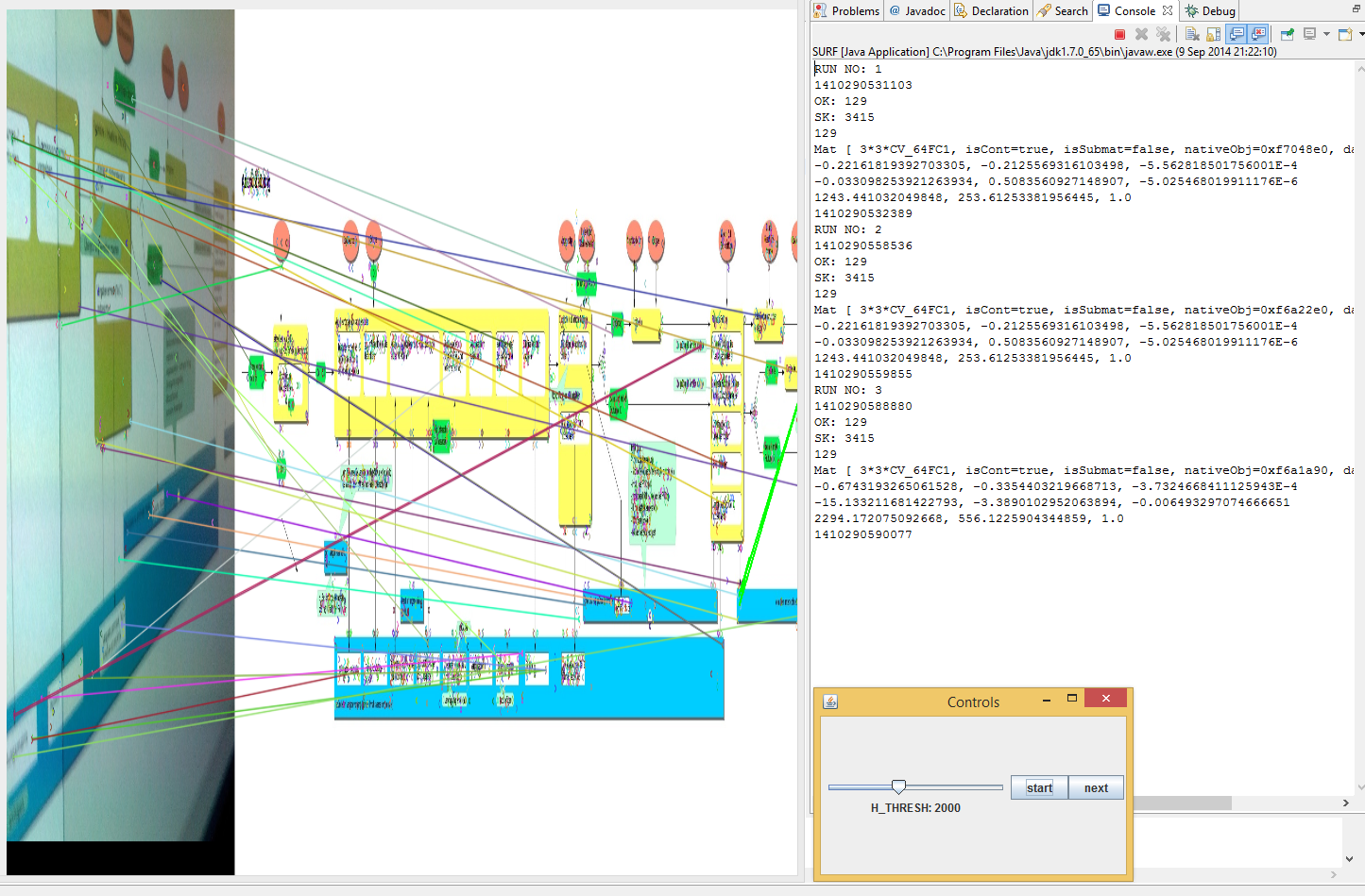
Can anyone explain why? Or tell me how to prevent it? When I restart the whole program, it will again detect 2 times correct and afterwards varying. After several tries it will again calculate the correct hg (from the first and seceond try). I can't figure out why this is happending.
Thanks in advance gemorra