I'm trying to use features2d SURF to detect a given image (a video frame) in a bigger panorama image. But either SURF isn't suitable for this task or I couldn't use it correctly. What I get as output are images that look like this:
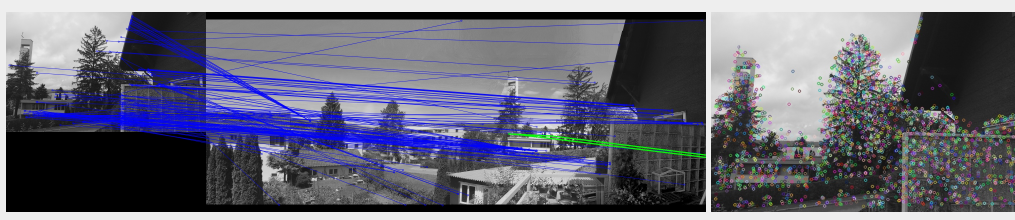
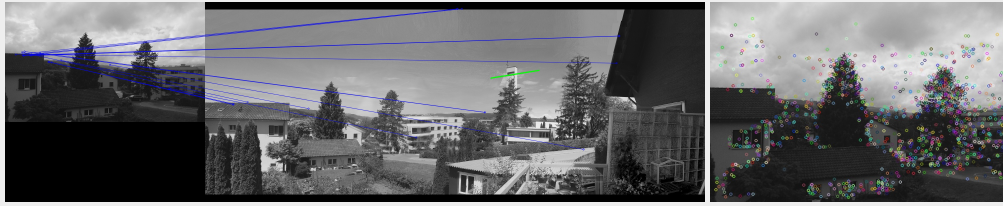
which seems pretty poor to me. I did filter only the good matches. I used this tutorial: homography tutorial
Along with this Java code from another question: homography tutorial in Java
To explain my code: the panoramaImage is the big image I want to match every video frame with and the smallMats is a List from Mats that are video frames.
Now my question: (1) Is anything wrong with my code (besides that its ugly sometimes) or (2) is SURF just not good for this task? If (2) -> please tell me alternatives :)
Your answers are greatly appreciated, thanks!
Isa
log.append(TAG + "----Sampling using SURF algo-----" + "\n");
log.append(TAG + "----Detecting SURF keypoints-----" + "\n");
MatOfKeyPoint keypointsPanorama = new MatOfKeyPoint();
LinkedList<MatOfKeyPoint> keypointsVideo = new LinkedList<MatOfKeyPoint>();
// detect panorama keypoints
SURFfeatureDetector.detect(panoramaImage, keypointsPanorama);
// detect video keypoints
for (int i = 0; i < videoSize; i++) {
MatOfKeyPoint keypoints = new MatOfKeyPoint();
SURFfeatureDetector.detect(smallMats.get(i), keypoints);
keypointsVideo.add(keypoints);
}
log.append(TAG + "----Drawing SURF keypoints-----" + "\n");
SURFPointedPanoramaImage.release();
Features2d.drawKeypoints(panoramaImage, keypointsPanorama,
SURFPointedPanoramaImage);
clearList(SURFPointedSmallImages);
for (int i = 0; i < videoSize; i++) {
Mat out = new Mat();
Features2d.drawKeypoints(smallMats.get(i), keypointsVideo.get(i),
out);
SURFPointedSmallImages.add(out);
}
log.append(TAG + "----Extracting SURF keypoints-----" + "\n");
Mat descriptorPanorama = new Mat();
LinkedList<Mat> descriptorVideo = new LinkedList<Mat>();
// extracting panorama keypoints
SURFextractor.compute(panoramaImage, keypointsPanorama,
descriptorPanorama);
// extracting video keypoints
for (int i = 0; i < videoSize; i++) {
Mat descriptorVid = new Mat();
SURFextractor.compute(smallMats.get(i), keypointsVideo.get(i),
descriptorVid);
descriptorVideo.add(descriptorVid);
}
log.append(TAG + "----Matching SURF keypoints-----" + "\n");
LinkedList<MatOfDMatch> matches = new LinkedList<MatOfDMatch>();
for (int i = 0; i < videoSize; i++) {
MatOfDMatch match = new MatOfDMatch();
FLANNmatcher.match(descriptorVideo.get(i), descriptorPanorama,
match);
// extract only good matches
List<DMatch> matchesList = match.toList();
match.release();
double max_dist = 0.0;
double min_dist = 100.0;
for (int j = 0; j < descriptorVideo.get(i).rows(); j++) {
Double dist = (double) matchesList.get(j).distance;
if (dist < min_dist)
min_dist = dist;
if (dist > max_dist)
max_dist = dist;
}
log.append(TAG
+ "-- Extracting good matches from video object nr: " + i
+ "\n");
log.append(TAG + "-- Max dist : " + max_dist + "\n");
log.append(TAG + "-- Min dist : " + min_dist + "\n");
LinkedList<DMatch> good_matches = new LinkedList<DMatch>();
MatOfDMatch goodMatch = new MatOfDMatch();
for (int j = 0; j < descriptorVideo.get(i).rows(); j++) {
if (matchesList.get(j).distance < 3 * min_dist) {
good_matches.addLast(matchesList.get(j));
}
}
goodMatch.fromList(good_matches);
matches.add(goodMatch);
}
log.append(TAG + "----Drawing SURF matches-----" + "\n");
clearList(matchedBigMatsSURF);
locationsSURFMatch.clear();
for (int i = 0; i < videoSize; i++) {
Mat img_matches = new Mat();
Features2d.drawMatches(smallMats.get(i), keypointsVideo.get(i),
panoramaImage, keypointsPanorama, matches.get(i),
img_matches, new Scalar(255, 0, 0), new Scalar(0, 0, 255),
new MatOfByte(), 2);
LinkedList<Point> objList = new LinkedList<Point>();
LinkedList<Point> sceneList = new LinkedList<Point>();
List<KeyPoint> keypoints_objectList = keypointsVideo.get(i)
.toList();
List<KeyPoint> keypoints_sceneList = keypointsPanorama.toList();
List<DMatch> good_matches = matches.get(i).toList();
for (int j = 0; j < good_matches.size(); j++) {
objList.addLast(keypoints_objectList.get(good_matches.get(j).queryIdx).pt);
sceneList
.addLast(keypoints_sceneList.get(good_matches.get(j).trainIdx).pt);
}
MatOfPoint2f obj = new MatOfPoint2f();
obj.fromList(objList);
MatOfPoint2f scene = new MatOfPoint2f();
scene.fromList(sceneList);
Mat hg = Calib3d.findHomography(obj, scene);
Mat obj_corners = new Mat(4, 1, CvType.CV_32FC2);
Mat scene_corners = new Mat(4, 1, CvType.CV_32FC2);
obj_corners.put(0, 0, new double[] { 0, 0 });
obj_corners.put(1, 0, new double[] { smallMats.get(i).cols(), 0 });
obj_corners.put(2, 0, new double[] { smallMats.get(i).cols(),
smallMats.get(i).rows() });
obj_corners.put(3, 0, new double[] { 0, smallMats.get(i).rows() });
Core.perspectiveTransform(obj_corners, scene_corners, hg);
Point one = new Point(scene_corners.get(0, 0));
Point two = new Point(scene_corners.get(1, 0));
Point three = new Point(scene_corners.get(2, 0));
Point four = new Point(scene_corners.get(3, 0));
one.x = one.x + smallMats.get(i).cols();
two.x = two.x + smallMats.get(i).cols();
three.x = three.x + smallMats.get(i).cols();
four.x = four.x + smallMats.get(i).cols();
Core.line(img_matches, one, two, new Scalar(0, 255, 0), 4);
Core.line(img_matches, two, three, new Scalar(0, 255, 0), 4);
Core.line(img_matches, three, four, new Scalar(0, 255, 0), 4);
Core.line(img_matches, four, one, new Scalar(0, 255, 0), 4);
// calculate centroid of quadrilateral
double x = new Point(scene_corners.get(0, 0)).x
+ new Point(scene_corners.get(1, 0)).x
+ new Point(scene_corners.get(2, 0)).x
+ new Point(scene_corners.get(3, 0)).x;
double y = new Point(scene_corners.get(0, 0)).y
+ new Point(scene_corners.get(1, 0)).y
+ new Point(scene_corners.get(2, 0)).y
+ new Point(scene_corners.get(3, 0)).y;
obj.release();
scene.release();
obj_corners.release();
scene_corners.release();
locationsSURFMatch.add(new Vector2((int) x, (int) y));
matchedBigMatsSURF.add(img_matches);