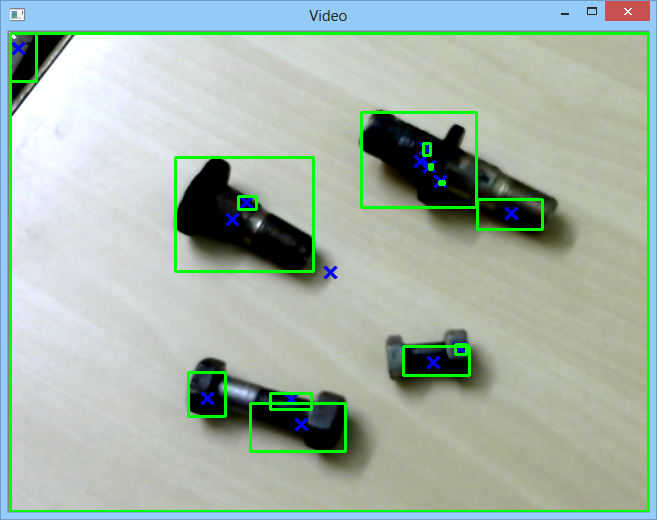
Hi All, i am succeed to recognize single object using KalmanFilter, and trying to detect Multiple objects but i am facing prob. Here's my code and attachment. This code works fine but instead of detecting whole object as one it is detecting sub objects in that. as you can see in image, i just want to draw only single rectangle on Nut, but unfortunately i am failed, and one more thing i have downloaded this code on Net and tried some modifications.
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/video/tracking.hpp>
using namespace std;
using namespace cv;
int H_MIN = 0;
int H_MAX = 256;
int S_MIN = 0;
int S_MAX = 256;
int V_MIN = 0;
int V_MAX = 256;
const string trackbarWindowName = "Trackbars";
#define drawCross( img, center, color, d )\
line(img, Point(center.x - d, center.y - d), Point(center.x + d, center.y + d), color, 2, CV_AA, 0);\
line(img, Point(center.x + d, center.y - d), Point(center.x - d, center.y + d), color, 2, CV_AA, 0 )\
int main()
{
Mat frame, thresh_frame;
vector<Mat> channels;
VideoCapture capture;
vector<Vec4i> hierarchy;
vector<vector<Point> > contours;
capture.open(0);
if(!capture.isOpened())
cerr << "Problem opening video source" << endl;
KalmanFilter KF(4, 2, 0);
Mat_<float> state(4, 1);
Mat_<float> processNoise(4, 1, CV_32F);
Mat_<float> measurement(2,1); measurement.setTo(Scalar(0));
KF.statePre.at<float>(0) = 0;
KF.statePre.at<float>(1) = 0;
KF.statePre.at<float>(2) = 0;
KF.statePre.at<float>(3) = 0;
KF.transitionMatrix = *(Mat_<float>(4, 4) << 1,0,1,0, 0,1,0,1, 0,0,1,0, 0,0,0,1); // Including velocity
KF.processNoiseCov = *(cv::Mat_<float>(4,4) << 0.2,0,0.2,0, 0,0.2,0,0.2, 0,0,0.3,0, 0,0,0,0.3);
setIdentity(KF.measurementMatrix);
setIdentity(KF.processNoiseCov, Scalar::all(1e-4));
setIdentity(KF.measurementNoiseCov, Scalar::all(1e-1));
setIdentity(KF.errorCovPost, Scalar::all(.1));
while((char)waitKey(1) != 'q' && capture.grab())
{
capture.retrieve(frame);
cvtColor(frame,thresh_frame,COLOR_BGR2GRAY);
Canny(thresh_frame,thresh_frame,100,200,3);//Detect Edges.
imshow("Edge Detection",thresh_frame);
medianBlur(thresh_frame, thresh_frame, 5);
findContours(thresh_frame, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat drawing = Mat::zeros(thresh_frame.size(), CV_8UC1);
for(size_t i = 0; i < contours.size(); i++)
{
// cout << contourArea(contours[i]) << endl;
if(contourArea(contours[i]) > 500)
drawContours(drawing, contours, i, Scalar::all(255), CV_FILLED, 8, vector<Vec4i>(), 0, Point());
}
thresh_frame = drawing;
// Get the moments
vector<Moments> mu(contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{ mu[i] = moments( contours[i], false ); }
// Get the mass centers:
vector<Point2f> mc( contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{ mc[i] = Point2f( mu[i].m10/mu[i].m00 , mu[i].m01/mu[i].m00 ); }
Mat prediction = KF.predict();
Point predictPt(prediction.at<float>(0),prediction.at<float>(1));
for(size_t i = 0; i < mc.size(); i++)
{
drawCross(frame, mc[i], Scalar(255, 0, 0), 5);//Scalar is color for predicted cross mark on identified object.
measurement(0) = mc[i].x;
measurement(1) = mc[i].y;
}
Point measPt(measurement(0),measurement(1));
Mat estimated = KF.correct(measurement);
Point statePt(estimated.at<float>(0),estimated.at<float>(1));
drawCross(frame, statePt, Scalar(255, 255, 255), 5);//Scalar is color for another correct cross mark on identified object.
vector<vector<Point> > contours_poly( contours.size() );
vector<Rect> boundRect( contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{ approxPolyDP( Mat(contours[i]), contours_poly[i], 3, true );
boundRect[i] = boundingRect( Mat(contours_poly[i]) );
}
for( size_t i = 0; i < contours.size(); i++ )
{
rectangle( frame, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 2, 8, 0 );//Scalar is for Bounding Box
}
imshow("Video", frame);
}
return 0;
}
Please suggest me where i am doing wrong. Regards, Jithendra.