Hello there,
I try to generate disparity of stereo image by using OpenCV and optimize performance by using GPU but the results of them are different.
StereoSGBM initialize
StereoSGBM sbm;
sbm.SADWindowSize = 3;
sbm.numberOfDisparities = 144;
sbm.preFilterCap = 63;
sbm.minDisparity = -39;
sbm.uniquenessRatio = 10;
sbm.speckleWindowSize = 100;
sbm.speckleRange = 32;
sbm.disp12MaxDiff = 1;
sbm.fullDP = false;
sbm.P1 = 216;
sbm.P2 = 864;
sbm(grayLeftCurrentFrameCPU, grayRightCurrentFrameCPU, resultCurrentFrameCPU);
normalize(resultCurrentFrameCPU, resultNorCurrentFrameCPU, 0, 255, CV_MINMAX, CV_8U);
gpu::StereoBM_GPU initialize
gpu::StereoBM_GPU *bm = new gpu::StereoBM_GPU();
bm->preset = gpu::StereoBM_GPU::BASIC_PRESET;
bm->ndisp = 48;
bm->winSize = 5;
bm->operator()(grayLeftCurrentFrameGPU, grayRightCurrentFrameGPU, resultCurrentFrameGPU);
gpu::normalize(resultCurrentFrameGPU, resultNorCurrentFrameGPU, 0, 255, CV_MINMAX, CV_8U);
Thanks!
(StereoSBM)

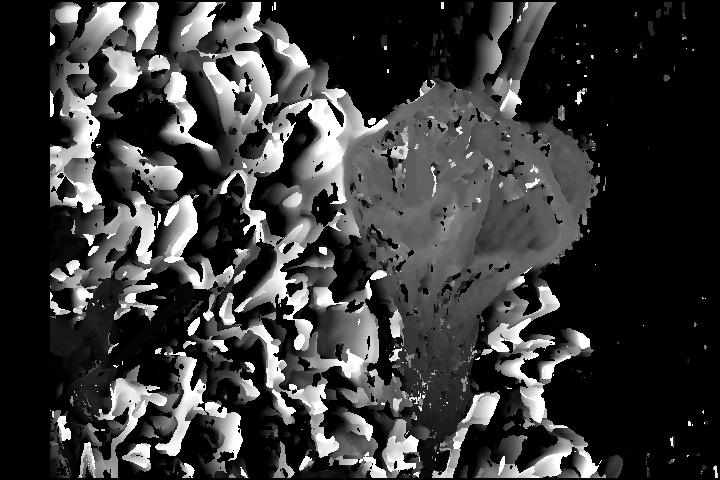
(gpu::StereoBM_GPU)