
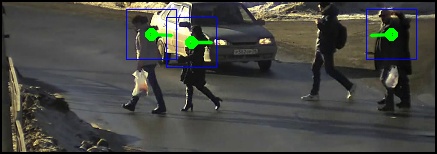
I'm trying detect moving direction of pedestrian by different way. One of a way is using motion gradient, but I have unacceptably wrong result. I don't understand, why it are not handled correctly (upperbody doesn't have some changing area)


code:
// ... HOG-detector
Rect r_hog // result of HOG
cvtColor(frame, frame, CV_BGR2GRAY );
cv::absdiff(frame, Preframe, diff);
cv::threshold(diff,diff,30,255, THRESH_BINARY);
cv::morphologyEx( diff, diff, cv::MORPH_CLOSE, cv::Mat( 5, 5, CV_8UC1 ) );
cv::morphologyEx( diff, diff, cv::MORPH_OPEN, cv::Mat( 5, 5, CV_8UC1 ), cv::Point( -1, -1 ), 1, cv::BORDER_CONSTANT, cv::Scalar( 0 ) );
Size imageSize = diff.size();
Mat m_motionHistoryImage( imageSize, CV_32FC1,0.0 );
Mat m_segmask( imageSize, CV_32FC1 );
Mat mask ( imageSize, CV_8UC1 );
Mat orientation( imageSize, CV_32FC1 );
double cycleTime = 0.04;
double m_maxMotionGradient( 1.5 * cycleTime );
double m_minMotionGradient = m_maxMotionGradient/10;
double m_motionHistoryDuration(7 * cycleTime ) ;
double time=clock();
double timestamp = (time - startTime) / CLOCKS_PER_SEC/1000.0;
const double min_conrour_area = 200;
cv::updateMotionHistory( diff, m_motionHistoryImage, timestamp, m_motionHistoryDuration );
calcMotionGradient( m_motionHistoryImage, mask, orientation, m_minMotionGradient, m_maxMotionGradient, 3 );
Rect r_without_legs = Rect(r_hog.x,r_hog.y, r_hog.width, r_hog.height/2);
double angle = calcGlobalOrientation( orientation(r_without_legs), mask(r_without_legs), m_motionHistoryImage(r_without_legs), timestamp, m_motionHistoryDuration);
angle = 360 - angle;
// draw angle