Hi
I'm making avm(around view monitoring) image by getting four side images from four fisheye cameras.
This process has three parts:
- calibrate fisheye image/video/streaming
- get top view(bird view) image
- get avm image by synthesizing four side images
I has completed 1 and 2 parts, but I'm in trouble doing third part.
I researched it and I found that it is may related to 'stitching' or 'numpy array'.
But I don't know how to do it although I read documentation.
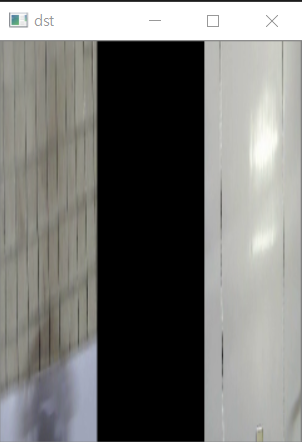
+add) presentresult image
C:\fakepath\AVM_test.png
code: (brought from github Ahid-Naif/Around-View-Monitoring-AVM)
import cv2
import numpy as np
import imutils
from Camera.Undistortion import UndistortFisheye
from Camera.PerspectiveTransformation import EagleView
# from Camera.Stitcher import stitchTwoImages
import time
class avm:
def __init__(self):
self.__leftCamera = UndistortFisheye("left_Camera")
self.__rightCamera = UndistortFisheye("right_Camera")
self.__leftEagle = EagleView()
self.__rightEagle = EagleView()
# self.__frontEagle.setDimensions((149, 195), (439, 207), (528, 380), (37, 374))
# self.__backEagle.setDimensions((164, 229), (469, 229), (588, 430), (45, 435))
#reset left/right setDimensions
self.__leftEagle.setDimensions((186, 195), (484, 207), (588, 402), (97, 363))
self.__rightEagle.setDimensions((171, 240), (469, 240), (603, 452), (52, 441))
# self.__leftEagle.setDimensions((186, 195), (484, 207), (588, 402), (97, 363))
# self.__rightEagle.setDimensions((171, 240), (469, 240), (603, 452), (52, 441))
self.__middleView = None
self.__counter = 0
# self.stitcher = stitchTwoImages("Bottom2Upper")
# self.upper = None
# self.bottom = None
def runAVM(self, leftFrame, rightFrame):
leftView = self.__leftCamera.undistort(leftFrame)
topDown_left = self.__leftEagle.transfrom(leftView)
rightView = self.__rightCamera.undistort(rightFrame)
topDown_right = self.__rightEagle.transfrom(rightView)
# topDown_Back = cv2.flip(topDown_Back, 1) #flip left/right
topDown_left , topDown_right = self.__reScale(topDown_left, topDown_right)
# stitchingResult = self.__startStitching(topDown_Front)
middleView = self.__getMiddleView(topDown_left)
birdView = np.hstack((topDown_left, middleView, topDown_right))
return birdView
def __reScale(self, topDown_left, topDown_right):
width_leftView = topDown_left.shape[1]
width_rightView = topDown_right.shape[1]
height_leftView = topDown_left.shape[0]
height_rightView = topDown_right.shape[0]
if height_leftView > height_rightView:
newHeight = height_rightView
ratio = height_rightView/height_leftView
newWidth = int(ratio * width_leftView)
topDown_left = cv2.resize(topDown_left, (newWidth, newHeight))
else:
newHeight = height_leftView
ratio = height_leftView/height_rightView
newWidth = int(ratio * width_rightView)
topDown_right = cv2.resize(topDown_right, (newWidth, newHeight))
return topDown_left, topDown_right
def __getMiddleView(self, topDown_left):
# the length of the image represents the distance in front or back of the car
width_leftView = topDown_left.shape[1]
if self.__middleView is None:
realWidth_leftView = 13 # unit is cm
realWidth_MiddleView = 29.5 # unit is cm
ratio = int(width_leftView/realWidth_leftView)
width_MiddleView = int(realWidth_MiddleView * ratio)
height_MiddleView = int(topDown_left.shape[0])
self.__middleView = np.zeros((height_MiddleView, width_MiddleView//2, 3), np.uint8)
# print(ratio)
# else:
# # self.__middleView[0:stitchingResult.shape[0], :]
return self.__middleView
# def __startStitching(self, accView):
# if self.bottom is None:
# self.bottom = accView
# return None
# else:
# # time.sleep(0.5)
# self.upper = accView
# self.bottom = self.stitcher.stitch(self.bottom, self.upper)
# cv2.imshow("Result", self.bottom)
# height = accView.shape[0]
# return self.bottom[height:self.bottom.shape[0], :]
If you know anythings about it, please comment and share your thoughts.
Thank you for your reading.
(I'm using opencv, python)python, raspberrypi 4B)
{kind=link}