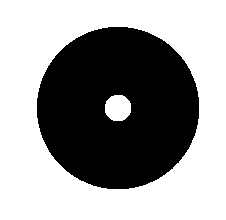
I have tracked down an issue I am having with the SimpleBlobDetector. Using the image below as a minimal example, if attempting to find "white" blobs, then the algorithm will erroneously mark the larger black circle as a match. When filtering by color, the only point used by the algorithm is the blob center.
I am curious if others think that this is an issue and submitted to github, or if it is an artifact of the design and I should manage it myself. I have made a change in my code that looks at the average value of the pixels in a blob and compares that against the color filter, and it works nicely. However, I also realize that a change to the default behavior using my solution is undesirable, as it may increase processing time.
I figured asking here was a better place for discussion than submitting an issue on github.
