Hello everybody,
This might be a simple questions but I am stuck on it, so any help would be really appreciated.
Reading the book "Learning OpenCV" written by Gary Bradski and Adrian Kaehler, I came upon the following relation relating the position of a point in the right camera reference to the left camera reference :
Where R and T are the rotation matrix and translation vector between the 2 cameras.
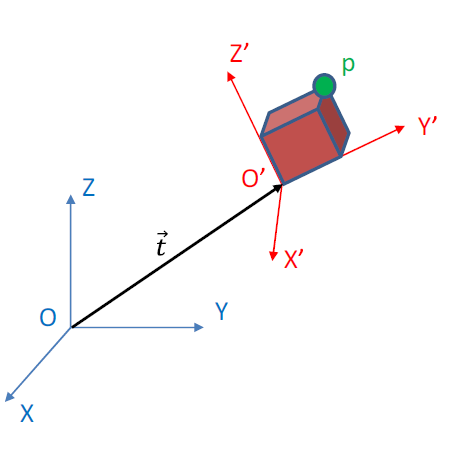
As far as I know, a point in a reference Ox'y'z' can be expressed in the reference Oxyz by computing :

So could anyone explain the relation found in the book?
Thank you.
 (which comes from what I just said above),
we can finally get
(which comes from what I just said above),
we can finally get