I am using the code given by the OpenCV to find tvecs and rvecs of the camera which I calibrated intrinsically. I do get these two vectors, no problem.
rvecs: [[-0.73059634]
[-0.02493155]
[ 0.1556929 ]]
tvecs: [[-2.8194188 ]
[ 1.25920043]
[77.38695895]]
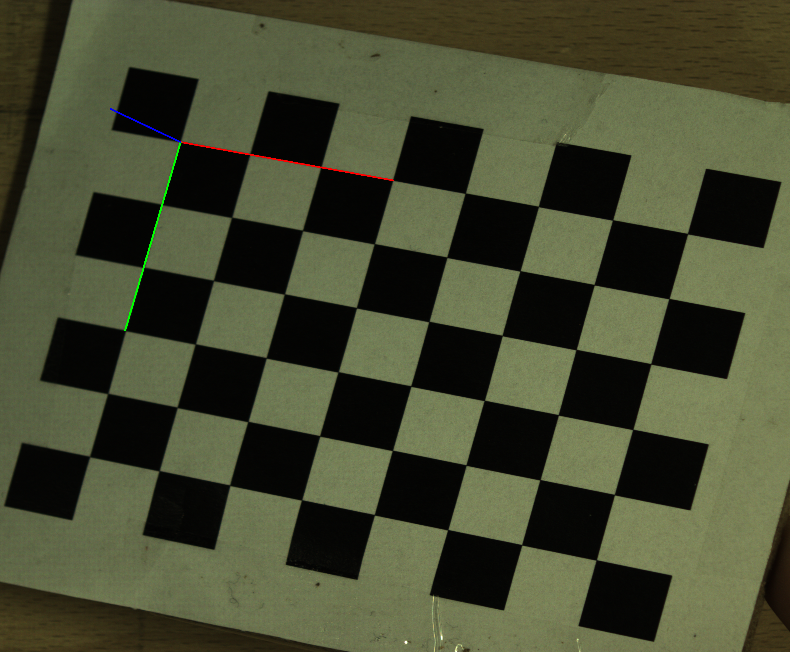
However, I am not sure if these are the values for my camera or my checkerboard. The language used in the tutorial isn't totally clear. But I think these are the values for the checkerboard, like, this isn't the pose of the camera, but rather the pose of the board, which is not why people use this code in the first place.
My question is, how could we go to camera extrinsics from these vectors?