I'm currently working in a Project to calibrate cameras over multiple Images.
I have images of solarpowercells and my job is to correct the perspective and lens distortion of the image.
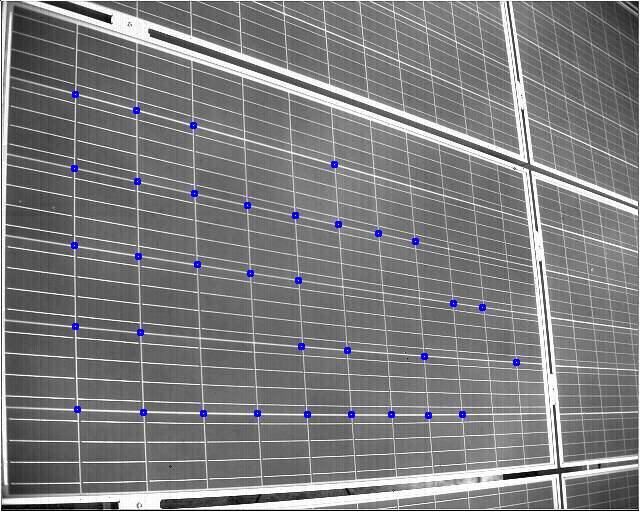
Now I have a procedure to get crosspoints inside the cell and am looking to transform the picture through these points on to a fixed grid that I have calculated. I can correct the perspective with them , but not the lens distortion.
I am currently using 12 images for this. In each image I do get a different amount of points.
I am pretty much using this example code: Here
My result sadly is quite bad. 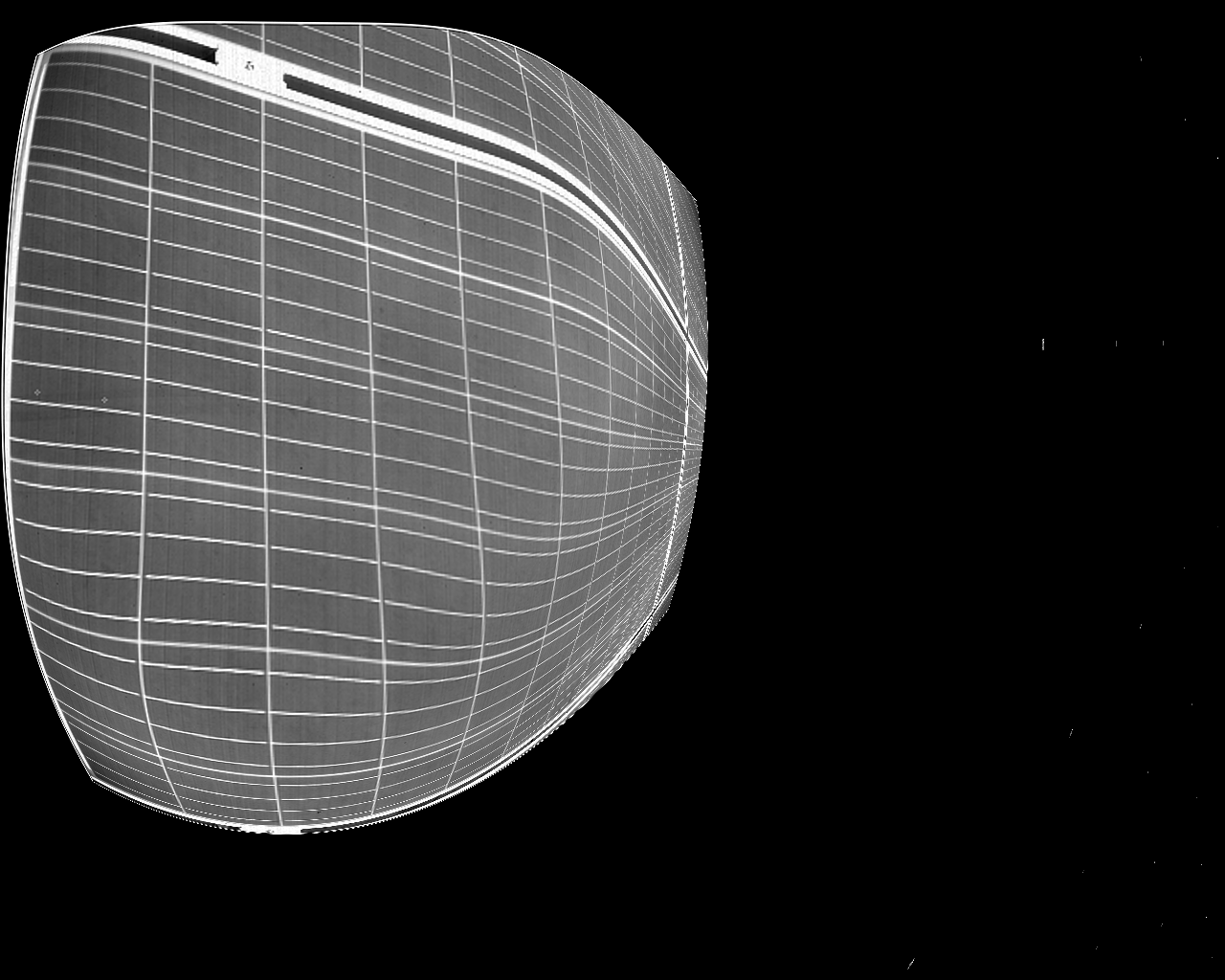
I am using OpenCV Version 3.4.5 and have concatenated the image and object points into two big Arrays. So I have one Nx3 and one Nx2 Array
I'm not sure what I am doing wrong and how to proceed. Since the ROI is all set to 0 I did circumvent the optimized camera matrix for now.
Any hint as to what might be the problem would be greatly appreciated.
Regards, Chris
Here is my Code of the calibration:
objpoints = []
imgpoints = []
z = np.zeros(())
print("starting loop")
for file in glob.glob(dataset):
filename = os.path.basename(file)
print(filename)
to_open = os.path.join(subfolder, filename)
data = np.loadtxt(to_open)
z = np.zeros((data.shape[0],1),np.float32)
#ob = data[:,2:4]
objp = np.hstack( [data[:,4:6], z] )
#objp[:, [1,0]] = objp[:, [0,1]]#np.array(data[:,2],data[:,3],z)
imgp = data[:,0:2]
#imgp[:, [1, 0]] = imgp[:, [0, 1]]
for i in range(0,objp.shape[0]):
objpoints.append((objp[i,0],objp[i,1],objp[i,2]))
imgpoints.append((imgp[i,0], imgp[i,1]))
objpointsa = np.array([objpoints]).astype(np.float32)
imgpointsa = np.array([imgpoints]).astype(np.float32)
ret, mtx, dist, rvecs, tvecs = iman.calibrate(imgpointsa,objpointsa)
print("calibration matrices established")
to_open = os.path.join(subfolder, filename)
img = cv2.imread('1-67-24-cam31_f25_k20_7A-06-03-10-03-24_live.png')
#h, w = img.shape[:2]
h = img.shape[0]
w = img.shape[1]
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),1,(w,h))
# undistort
#dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
dst = cv2.undistort(img, mtx, dist, None, mtx)
print(dst)
# crop the image
#x,y,w,h = roi
#dst = dst[y:y+h, x:x+w]
#dst = iman.drawpoints(dst,np.array([1.0,1.0]),0)
cv2.imwrite('calibresult.png',dst)