Hello guys, I am sorry to ask without code. I tried to calibrate my stereo fisheyes and failed, tried for a week to do it. Rectification and stereo calibrate is bad somehow. Anyways, my plan is for the drones. Drone will have one or two cameras and it will fly on a vineyard. As you know, vineyard is basically in column shape. So when flying over a column, I need to understand that I am in the middle of the column . Otherwise it means that I need to go left or right. Example:
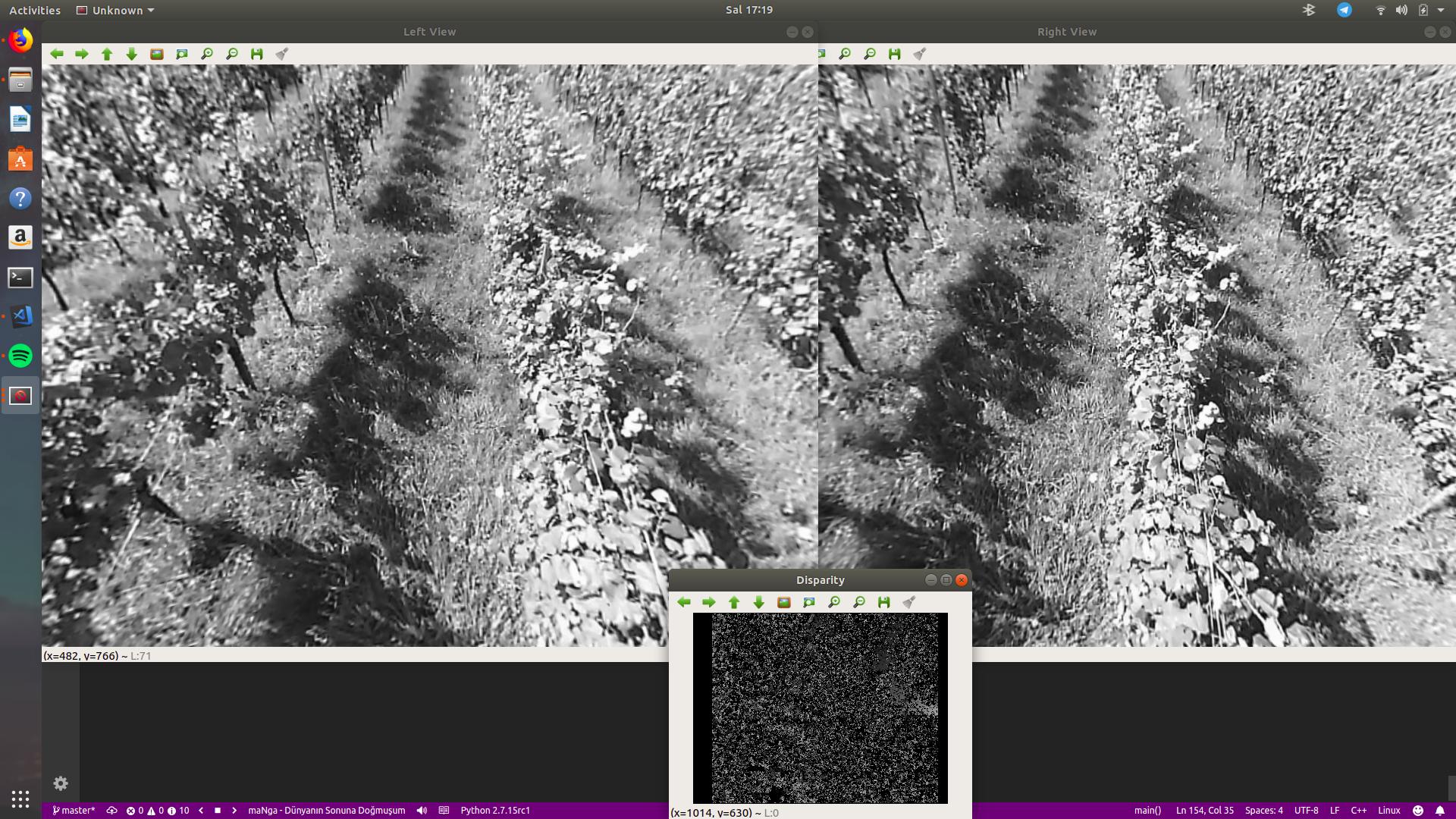
If you can give me some hints I'd be so grateful. I think that if I had depth image I can take gradients to see if my rotation and location is correct or not. Or I can do some segmentation and split the images and get different gradients. It is so confusing. I don't want code, I just want some ideas. Thanks to all, great day.