Hello.
My problem in short: on desktop my application works good, on singleboard PC it freezes. Even with simple video output from webcamera (imshow() ) it glitches.
I have created application on desktop, it uses USB webcamera and make processing video stream. Parameters of desktop: Win7 64-bit, AMD A4-4000(2 cores @3.00GHz), integrated Graphics Radeon HD7480D, 8 GB RAM.
On this PC my application runs without issues (I didnt measure actual FPS value, but video looks smooth enough).
My video processing algoritm consumes ~120MB of RAM, CPU loaded at 50%;
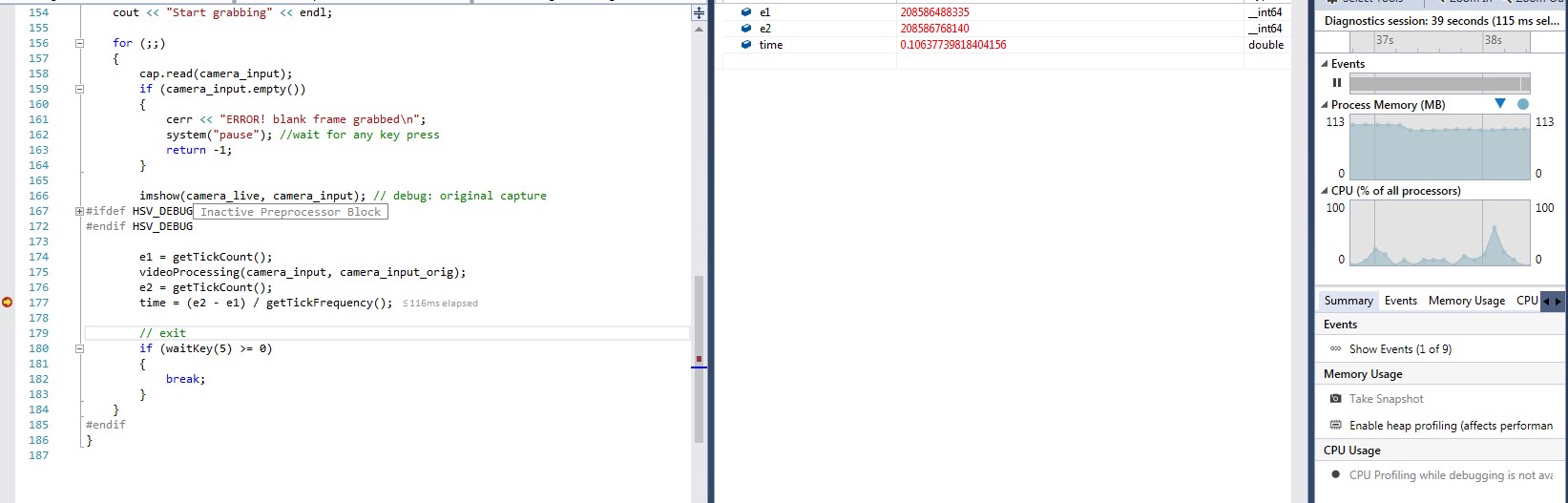
Also it takes about 70~120 ms per frame for processing.
Goal is to port my algoritm on single board PC. My SBPC: Sopine Parameters: CPU: ARM A64 (4 cores @1.1GHz , 64 bit) GPU: ARM Mali400MP2 Dual-core RAM: 2 GB
I have tested it on next operation systems: Armbian, Xenial Mate. Even when I tried to show in opencv video output from webcamera, application freezes and CPU load becomes up to 100%.
Also, I'm testing web camera output with simple linux application - cheese. On Xenial Mate distributive it shows stream smoothly. My application in "imshow only" mode still freezes. On Armbian both (cheese and my application ) are freezing.
I'm not advanced user on Linux, but from my experience with Windows it looks like some drivers are missing.
Code is below. Maybe there are some issues with it? In general, it makes HSV selection for specific color and finds coutours with large areas, then prints does object with this color finded or no.
CODE:
void videoProcessing(Mat& camera_input, Mat& original_img){ camera_input.copyTo(original_img); // object color // H: 25 - 90 // S: 0 - 255 // V: 50 - 255
cvtColor(camera_input, camera_input, COLOR_BGR2HSV); //Convert the captured frame
inRange(camera_input, Scalar(25, 0, 50), Scalar(90, 255, 255), camera_input);
//imshow("camera_ranged", camera_input); // debug: HSV colorspace image
//morphological operations
erode(camera_input, camera_input, getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));
dilate(camera_input, camera_input, getStructuringElement(MORPH_RECT, Size(10, 10)));
dilate(camera_input, camera_input, getStructuringElement(MORPH_ELLIPSE, Size(10, 10)));
//imshow("camera_morph", camera_input); // debug: morph image
vector < vector <Point>> contours;
findContours(camera_input, contours, RETR_LIST, CHAIN_APPROX_NONE, Point(0, 0));
Mat drawing = Mat::zeros(camera_input.size(), CV_8UC3);
for (size_t i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(121, 113, 96);
drawContours(drawing, contours, i, color, -1);
//imshow("contour", drawing); // debug: show contours
}
gl_obj_decected = false;
// Find areas
vector <double> areas;
for (size_t i = 0; i < contours.size(); i++)
{
areas.push_back(contourArea(contours[i], false));
//printf("--------------contour #%d area:%f\n", i, areas[i]); // debug
if (areas[i] >= 40000)
{
if (counterFound > 3)
{
gl_obj_decected = true;
}
}
}
// prevent bouncing
if (counterFound > 3)
{
if ((gl_obj_decected == true) && (gl_obj_last_state == false))
{
printf("[FOUND] Open solenoid...\n");
gl_obj_last_state = true;
}
else if ((gl_obj_decected == false) && (gl_obj_last_state == true))
{
printf("[NOT FOUND] Close solenoid\n");
gl_obj_last_state = false;
}
counterFound = 0;
}
counterFound++;
if (gl_obj_decected)
{
// show some text on initial image
printVideoOverlay(original_img);
}
}
int main(int argc, char* argv[]){
Mat camera_input, camera_input_orig;
VideoCapture cap;
//----------------------
int64 e1, e2; // testing clock counts for operations
double time;
//----------------------
cap.open(0);
if (!cap.isOpened())
{
cerr << "ERROR! Unable to open camera\n";
system("pause"); //wait for any key press
return -1;
}
cout << "Start grabbing" << endl;
for (;;)
{
cap.read(camera_input);
if (camera_input.empty())
{
cerr << "ERROR! blank frame grabbed\n";
system("pause"); //wait for any key press
return -1;
}
imshow(camera_live, camera_input); // debug: original capture
e1 = getTickCount(); // test algoritm speed
videoProcessing(camera_input, camera_input_orig);
e2 = getTickCount(); // test algoritm speed
time = (e2 - e1) / getTickFrequency(); // test algoritm speed (total time)
// exit
if (waitKey(5) >= 0)
{
break;
}
}
}
And on pastenin
1) Please advices me what should I check about "drivers"?
2) Does it possible to use Mali GPU with OpenCV? If yes, are there some examples of usage?
3) Any glaring mistakes with code?
Regards