I am working on the camera (iphone camera) pose estimation for head mount device (Hololens) using LEDs as a marker, using the solvepnp. I have calibrated the camera below is the camera intrinsic parameters
/* approx model*/
double focal_length = image.cols;
Point2d center = cv::Point2d(image.cols/2,image.rows/2);
iphone_camera_matrix = (cv::Mat_<double>(3,3) << focal_length, 0, center.x, 0 , focal_length, center.y, 0, 0, 1); iphone_dist_coeffs = cv::Mat::zeros(4,1,cv::DataType<double>::type);
/* caliberated(usng opencv) model */
iphone_camera_matrix = (cv::Mat_<double>(3,3) <<839.43920487140315, 0, 240, 0, 839.43920487140315, 424, 0, 0, 1);
iphone_dist_coeffs = (cv::Mat_<double>(5,1) <<4.6476561543838640e-02, -2.0580084834071521, 0, 0 ,2.0182662261396342e+01);
usng solvpnp am able to get the proper object pose in camera co-ordinate system below is the code
cv::solvePnP(world_points, image_points, iphone_camera_matrix, iphone_dist_coeffs, rotation_vector, translation_vector, true, SOLVEPNP_ITERATIVE);
the ouput is
rotation_vector :
[-65.41956646885059;
-52.49185328449133;
36.82917796058498]
translation_vector :
[94.1158604375937;
-164.2178023980637;
580.5666657301058]
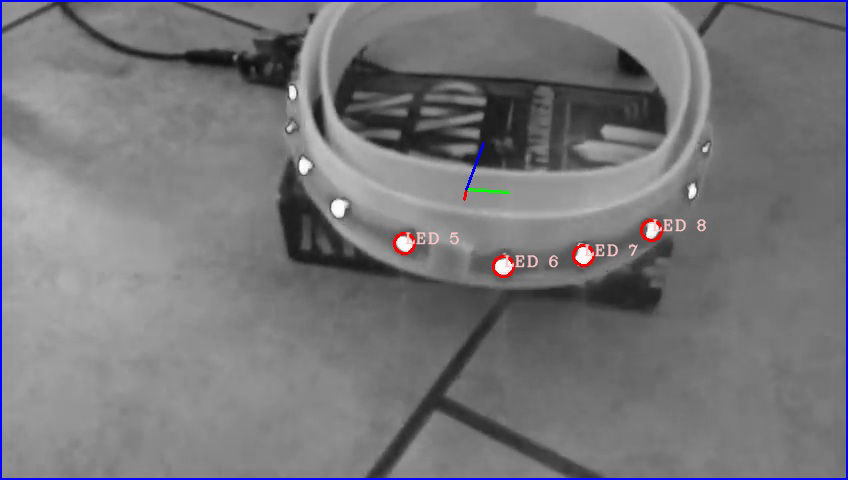
using this rotation_vector and translation_vector am visualizing pose by projecting the trivector whose points are
points_to_project :
[0, 0, 0;
20, 0, 0;
0, 20, 0;
0, 0, 20]
projectPoints(points_to_project, rotation_vector, translation_vector, iphone_camera_matrix, iphone_dist_coeffs, projected_points);
the output of projectedPoints given as
projected_points :
[376.88803, 185.15131;
383.05768, 195.77643;
406.46454, 175.12997;
372.67371, 155.56181]
which seems correct as shown below
I try to find the camera pose in world/object coordinate system by using the transformation of rotation_vector and translation_vector given by solvepnp as
cv::Rodrigues(rotation_vector, rotation_matrix);
rot_matrix_wld = rotation_matrix.t();
translation_vec_wld = -rot_matrix_wld * translation_vector;
I used the rot_matrix_wld, translation_vec_wld to visualize the pose (same way as how I visualized the pose of the object in the camera coordinate system as said in the above)
projectPoints(points_to_project, rot_matrix_wld, translation_vec_wld, iphone_camera_matrix, iphone_dist_coeffs, projected_points);
with
points_to_project :
[0, 0, 0;
20, 0, 0;
0, 20, 0;
0, 0, 20]
am getting wrong translation vector (below 2 projected_points are for 2 different image frames of a video)
projected_points :
[-795.11768, -975.85846;
-877.84937, -932.39697;
-868.5517, -1197.4443;
projected_points :
[589.42999, 3019.0732;
590.64789, 2665.5835;
479.49728, 2154.8057;
187.78407, 3333.3054]
-593.41058, -851.74432]
I have used the approx camera model and calibrated camera model both are giving the wrong translation vector.
I have gone through the link here and verified my calibration procedure, I did it correctly.
I am not sure where am doing wrong can anyone please help me with this.
thanks in advance.