Hi,
I have done camera calibration recently and the output only seems to contain the focal length (f) and principal point (cx and cy) as indicated here.
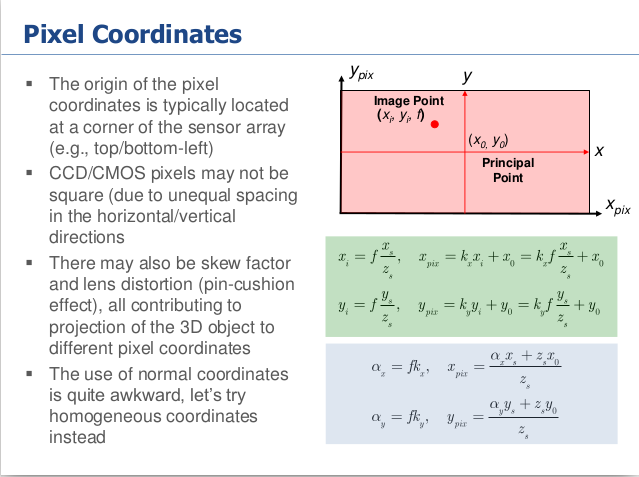
However, from the theory it is known that (digital) camera sensors can involve sheer and unequal sizes pixel grids in x and y direction.
My Question: Does openCV account for sheer or unequal grid sizes ? I can't find this in the docs ....
Thanks!