Hi,
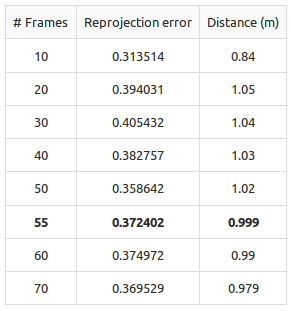
I'm using the default camera calibration from opencv to calibrate a Raspberry pi camera. I ran the calibration multiple times with different amount of images. Combined with an aruco marker I tested the accuracy of the depth calculation, in the image underneath you can see the results, I placed the camera 1 m away from the marker and ran some code to calculate the distance till the marker. So like expected the distance became more accurate the more images I used for the calibration. But after 55 frames the distance became less accurate, the opposite of what I was expecting. Does anyone have an explanation for this, or am I combining two things which have nothing to do with each other?
Thanks!