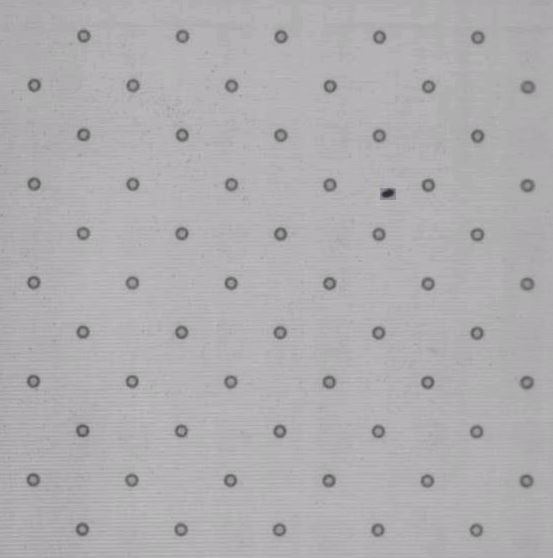
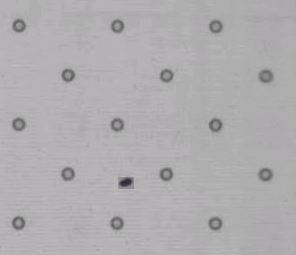
Hi in the below image how do you find and mark all the circles and identify the defect, my vs is vs2010 and opencv 2.4.10
| | 1 | initial version |
Hi in the below image how do you find and mark all the circles and identify the defect, my vs is vs2010 and opencv 2.4.10
Hi in the below image how do you find and mark all the circles and identify the defect, my vs is vs2010 and opencv 2.4.10
Hi in the below image how do you find and mark all the circles and identify the defect, my vs is vs2010 and opencv 2.4.10
this is my code so far, but it doesnt detect anything
static void findCircles2(const Mat& image)
{ vector<vec3f> circles; int thresh1 = 5; Mat pyr, timg, gray0(image.size(), CV_8U), gray; pyrDown(image, pyr, Size(image.cols/2, image.rows/2)); pyrUp(pyr, timg, image.size()); for( int c = 0; c < 3; c++ ) { int ch[] = {c, 0}; mixChannels(&timg, 1, &gray0, 1, ch, 1); Canny(gray0, gray, 0, thresh1, 5); //dilate(gray, gray, Mat(), Point(-1,-1)); gray = gray0 >= (1)255/N; gray = gray0 >= (2)255/N; gray = gray0 >= (6)*255/N; namedWindow( "Hough Circle Transform Demo 1", CV_WINDOW_AUTOSIZE ); imshow( "Hough Circle Transform Demo 1", gray ); waitKey(0);
HoughCircles( gray, circles, CV_HOUGH_GRADIENT, 1, gray.rows/8, 200, 100, 0, 0 );
cout<<"size of circles: "<<circles.size()<<endl;
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle( gray, center, 3, Scalar(0,255,0), -1, 8, 0 );
circle( gray, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
/// Show your results namedWindow( "Hough Circle Transform Demo 2", CV_WINDOW_AUTOSIZE ); imshow( "Hough Circle Transform Demo 2", gray );
waitKey(0);
}
}
Hi in the below image how do you find and mark all the circles and identify the defect, my vs is vs2010 and opencv 2.4.10
this is my code so far, but it doesnt detect anythinganything.
static void findCircles2(const Mat& image)
{ vector<vec3f> circles; int thresh1 = 5; Mat pyr, timg, gray0(image.size(), CV_8U), gray; pyrDown(image, pyr, Size(image.cols/2, image.rows/2)); pyrUp(pyr, timg, image.size()); for( int c = 0; c < 3; c++ ) { int ch[] = {c, 0}; mixChannels(&timg, 1, &gray0, 1, ch, 1); Canny(gray0, gray, 0, thresh1, 5); //dilate(gray, gray, Mat(), Point(-1,-1)); gray = gray0 >= (1)255/N; gray = gray0 >= (2)255/N; gray = gray0 >= (6)*255/N; namedWindow( "Hough Circle Transform Demo 1", CV_WINDOW_AUTOSIZE ); imshow( "Hough Circle Transform Demo 1", gray ); waitKey(0);
HoughCircles( gray, circles, CV_HOUGH_GRADIENT, 1, gray.rows/8, 200, 100, 0, 0 );
cout<<"size of circles: "<<circles.size()<<endl;
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle( gray, center, 3, Scalar(0,255,0), -1, 8, 0 );
circle( gray, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
/// Show your results namedWindow( "Hough Circle Transform Demo 2", CV_WINDOW_AUTOSIZE ); imshow( "Hough Circle Transform Demo 2", gray );
waitKey(0);
}
}
Hi in the below image how do you find and mark all the circles and identify the defect, my vs is vs2010 and opencv 2.4.10
this is my code so far, but it doesnt detect anything.anything:
static void findCircles2(const Mat& image)
{
vector<vec3f> vector<Vec3f> circles;
int thresh1 = 5;
Mat pyr, timg, gray0(image.size(), CV_8U), gray;
pyrDown(image, pyr, Size(image.cols/2, image.rows/2));
pyrUp(pyr, timg, image.size());
for( int c = 0; c < 3; c++ )
{
int ch[] = {c, 0};
mixChannels(&timg, 1, &gray0, 1, ch, 1);
Canny(gray0, gray, 0, thresh1, 5);
//dilate(gray, gray, Mat(), Point(-1,-1));
gray = gray0 >= (1)255/N;
(1)*255/N;
gray = gray0 >= (2)255/N;
(2)*255/N;
gray = gray0 >= (6)*255/N;
namedWindow( "Hough Circle Transform Demo 1", CV_WINDOW_AUTOSIZE );
imshow( "Hough Circle Transform Demo 1", gray );
waitKey(0);
waitKey(0);
HoughCircles( gray, circles, CV_HOUGH_GRADIENT, 1, gray.rows/8, 200, 100, 0, 0 );
cout<<"size of circles: "<<circles.size()<<endl;
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle( gray, center, 3, Scalar(0,255,0), -1, 8, 0 );
circle( gray, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
/// Show your results
namedWindow( "Hough Circle Transform Demo 2", CV_WINDOW_AUTOSIZE );
imshow( "Hough Circle Transform Demo 2", gray );
);
waitKey(0);
}
}
}
