Hi,
I have been struggling with detecting straight lines with HoughLines() after I used the canny edge detector.
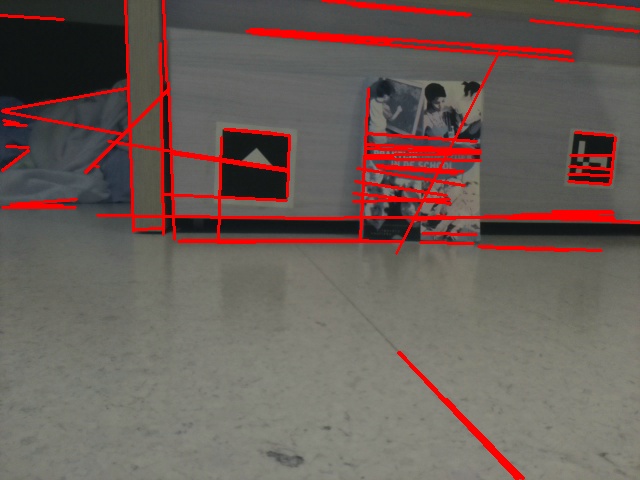
The canny edge detector works fine I believe (rectangle with triangle). But from the houghtransform I'm not been able to detect those lines. Underneath the pictures you will find the code I have been using and tried to play with the thershold values etc. I'm not really sure on how to improve the houghlines. Anyone who can help me?
Thanks

Mat img = this->frame.clone();
cv::cvtColor(img,img,CV_BGR2GRAY);
cv::Size size(3,3);
cv::GaussianBlur(img,img,size,0);
adaptiveThreshold(img, img,255,CV_ADAPTIVE_THRESH_MEAN_C, CV_THRESH_BINARY,249,10);
cv::imwrite("threshold.jpg", img);
cv::bitwise_not(img, img);
cv::imwrite("bitwise.jpg", img);
int lowThreshold = 100;
cv::Canny( img, img, lowThreshold, lowThreshold*3, 3 );
cv::imwrite("canny.jpg", img);
vector<Vec4i> lines;
HoughLinesP(img, lines, 1, CV_PI/180, 40, 5, 50);
cout << lines.size() << endl;
for( size_t i = 0; i < lines.size(); i++ )
{
line( this->frame, Point(lines[i][0], lines[i][1]),
Point(lines[i][2], lines[i][3]), Scalar(0,0,255), 2, 8 );
}
cv::imwrite("hough.jpg", frame);
cv::imshow("frame", this->frame);
cv::waitKey(1);

